

3D machine vision space detection calibration method
A machine vision and calibration method technology, applied in photogrammetry/video surveying, instruments, measuring devices, etc., can solve the problem of relative positioning detection without public information, etc., and achieve the effect of good accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
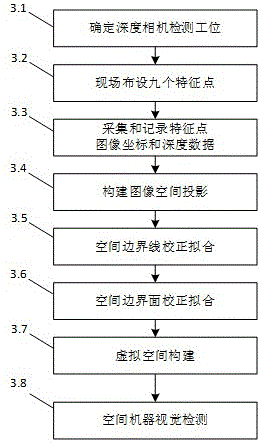
[0023] A 3D machine vision space detection and calibration method, such as image 3 As shown, its specific implementation steps are as follows:
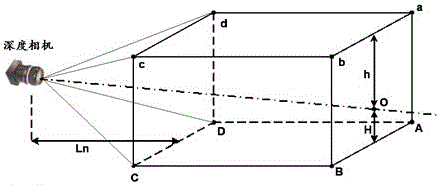
[0024] (1) Determine the depth camera detection station (3.1), so that the spatial detection area is in the center of the field of view of the depth camera, and the axis of the depth camera falls on the geometric center of the inspected space or the inspected object or the inspected area;
[0025] (2) Nine feature points (3.2) are laid out on the site, and the feature points are arranged around the axis of the depth camera, and are symmetrical in the horizontal direction;
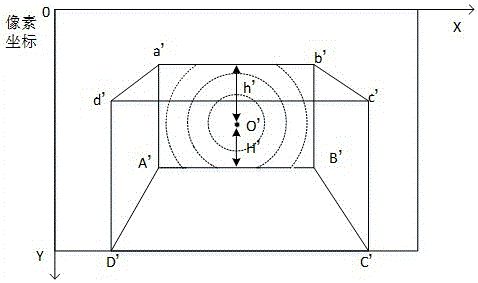
[0026] (3) Collect and record feature point image coordinates and depth data (3.3); through repeated sampling and digital filtering to obtain more accurate values, it is necessary to ensure that the position of the depth camera is fixed while collecting;
[0027] (4) Construct the image space projection (3.4) according to the collected feature point values;
[0...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More