

Work vehicle cooperation system
A technology for working vehicles and operations, applied in control/regulation systems, agriculture, motor vehicles, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
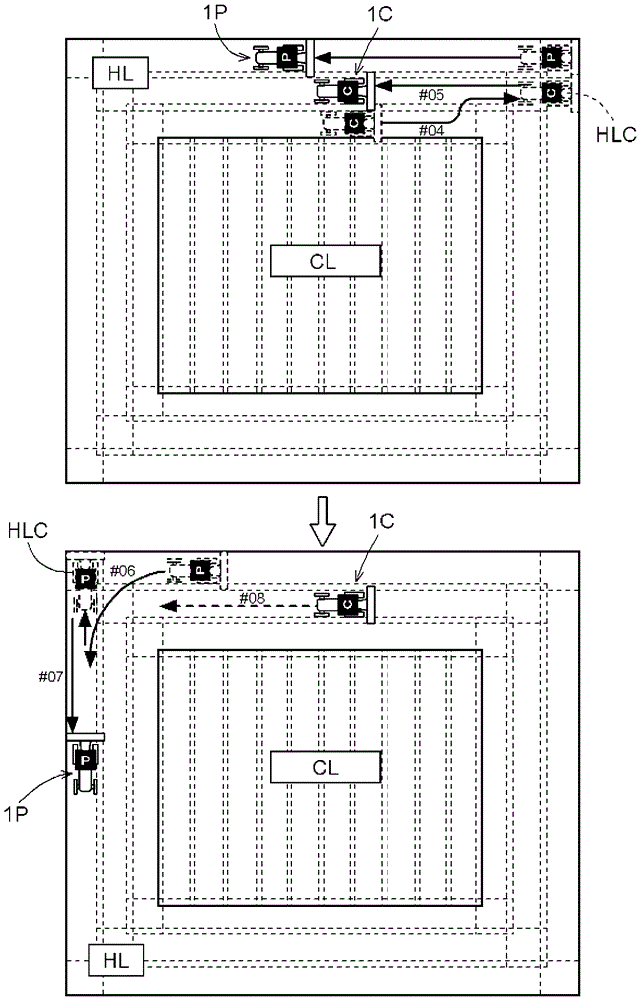
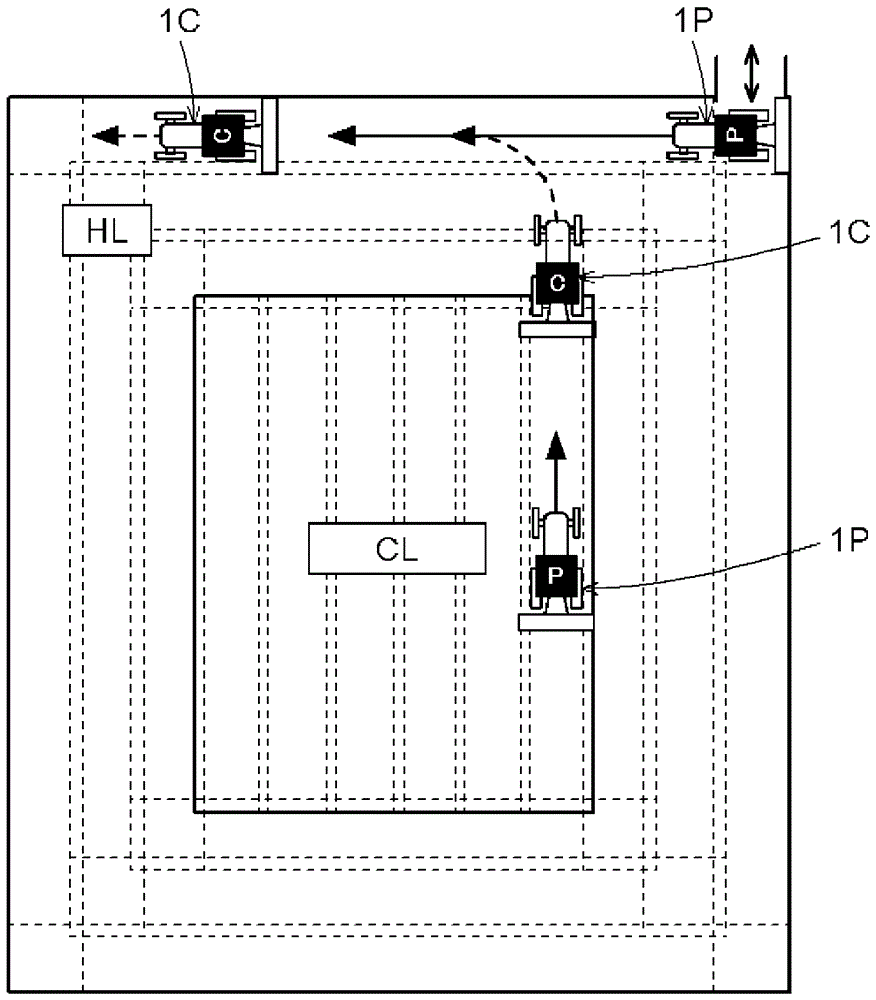
[0028] Before describing the specific implementation of the work vehicle coordination system of the present invention, use figure 1 , figure 2 , image 3 , Figure 4 A basic example of the travel trajectory of the parent work vehicle and the travel trajectory of the child work vehicle under the work vehicle coordination system will be described. In this work vehicle coordination system, the manned parent work vehicle 1P and the unmanned child work vehicle 1C jointly perform ground-breaking work.
[0029] In these examples, the ground work site is a farm demarcated by ridges, and the ground work is performed on the width of the ground work device as the work vehicle travels, like plowing work. In the work on the farm, a general farm is divided into a substantially quadrilateral central work site CL and uncultivated fields HL defined along the ridges around the central work site CL. In the central job site CL, such as figure 1As shown, the ground work is carried out by tra...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More