

A Scene Flow Estimation Method Based on 3D Local Rigidity and Depth Map Guided Anisotropic Smoothing
An anisotropic, scene flow technique, applied in the field of scene flow estimation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
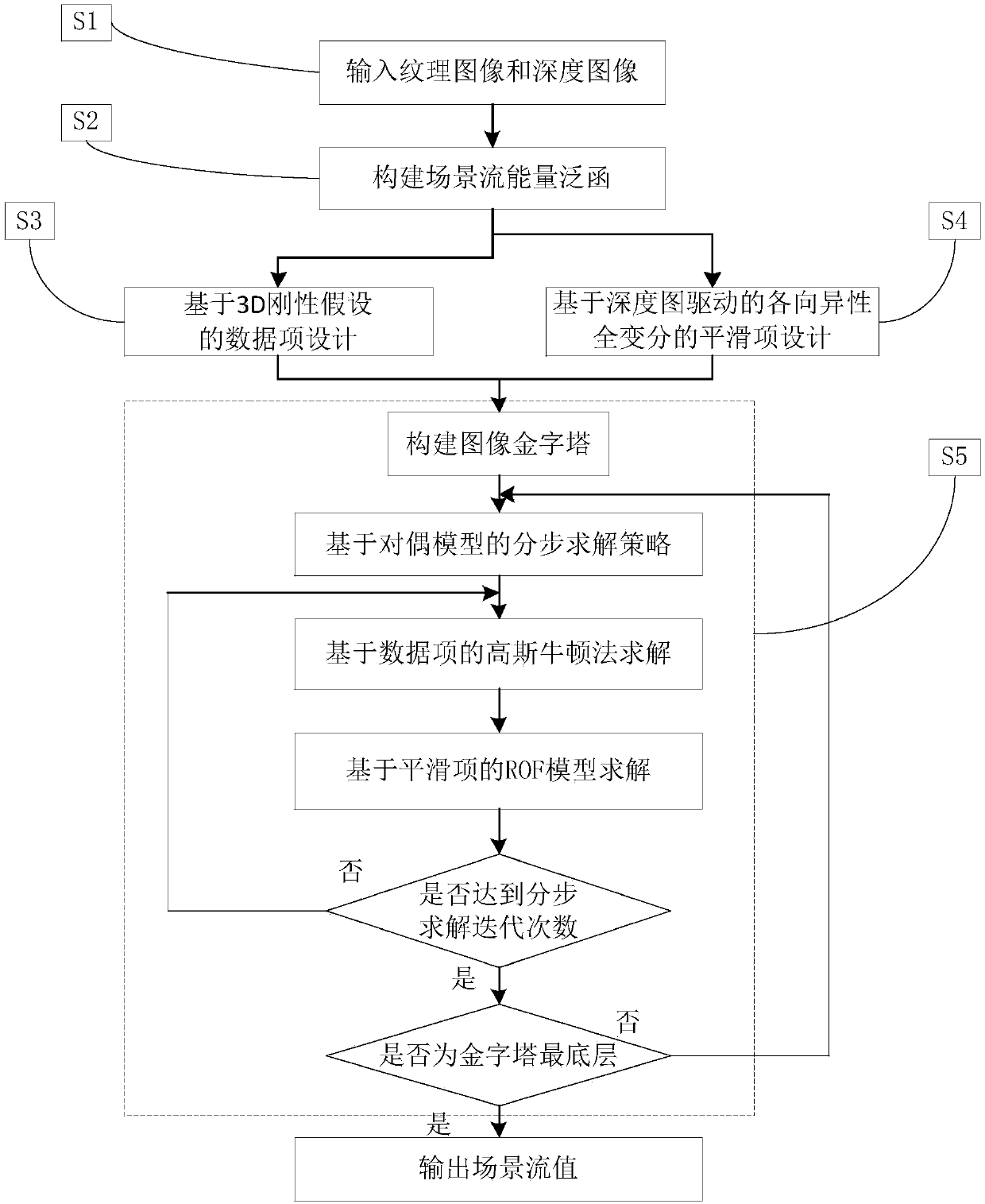
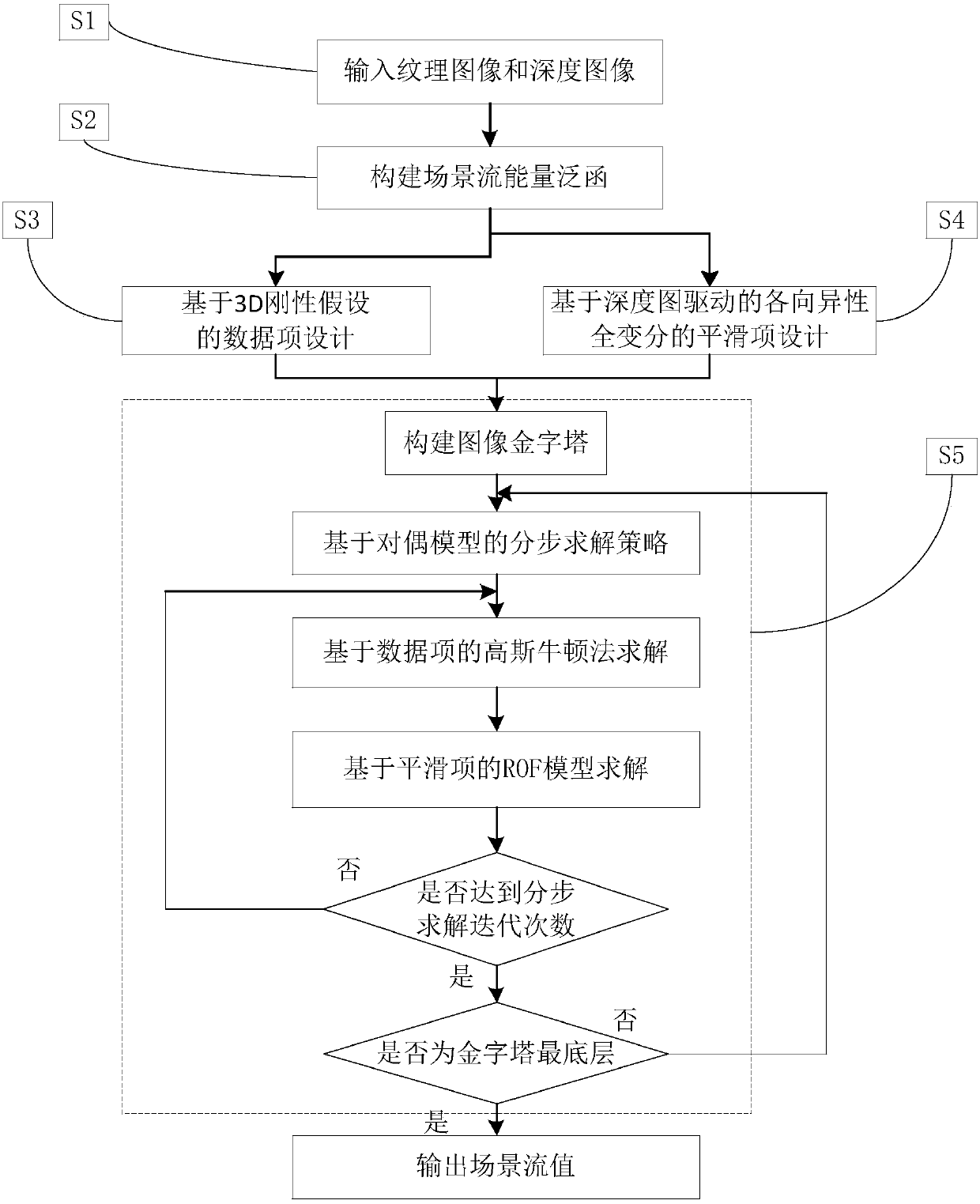
[0070] The present invention will be described in more detail below with reference to the accompanying drawings.
[0071] The 3D local rigid surface assumption and depth map-driven anisotropic total variational regularization jointly constrain scene flow. The 3D local rigid surface assumption can make the calculation of the scene flow more accurate; the anisotropic total variational regularization driven by the depth map can obtain the scene flow with dense and clear moving edges, and the combination of the two can obtain dense, accurate and clear moving edges. scene flow.
[0072] S1. Acquire scene texture image and depth image, and align the texture image and depth image with perspective. In order to ensure the accuracy of scene flow calculation and the reliability of depth map-guided scene flow anisotropic smoothing, the method of using texture image to repair , perform trilateral filter repair on the depth map.
[0073] S2. Use the variational method to solve the scene f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More