

Stereo vision system calibration platform and calibration method based on solid circular calibration plate
A system calibration and stereo vision technology, applied in the field of stereo vision system calibration platform, can solve the problems of too many optimization variables and complicated calculations, and achieve high-precision results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
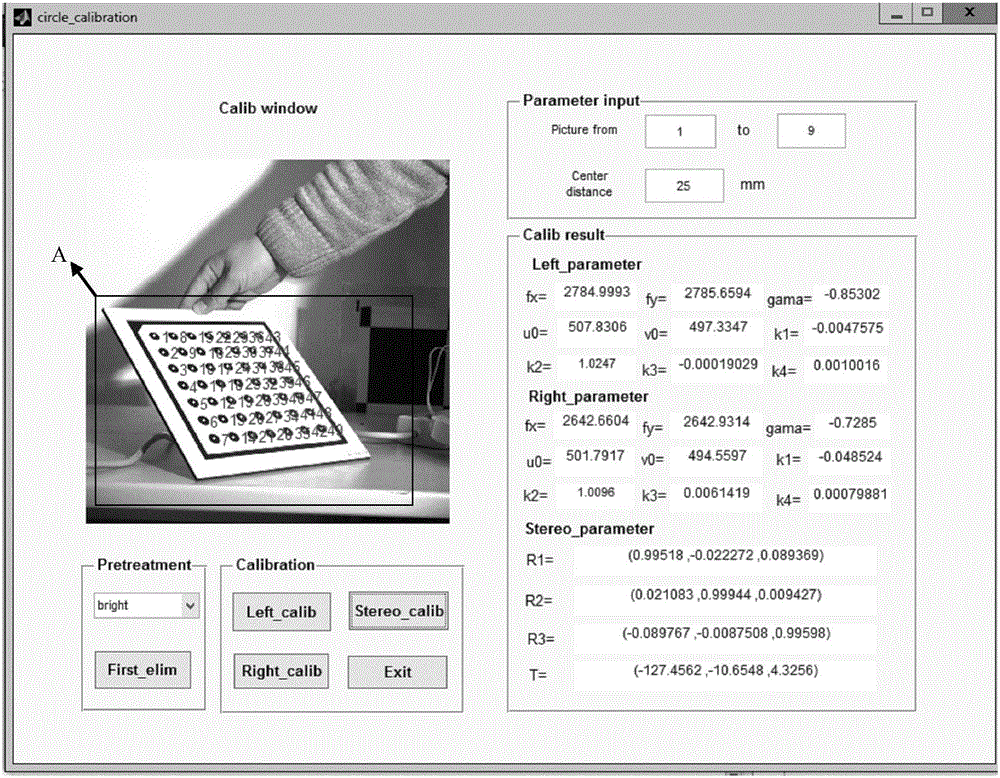
[0041] Specific embodiment one: a kind of stereo vision system calibration platform based on the solid circle calibration board of this embodiment comprises:
[0042] An input module (Parameter input) for inputting the number of pictures to be calibrated and the center-to-center distance parameters of adjacent solid circles on the calibration board;
[0043] An image preprocessing module (Pretreatment) for preprocessing the image to be calibrated in the parameter input module;
[0044] A system calibration module (Calibration) for performing left image calibration, right image calibration and stereo calibration on the picture processed by the image preprocessing module;
[0045] A parameter output module (Calibresult) for outputting the calibration results of the pictures calibrated by the system calibration module.
specific Embodiment approach 2
[0046] Specific embodiment two: the difference between this embodiment and specific embodiment one is: the image preprocessing module (Pretreatment) includes:
[0047] The Light sub-module is used to consider the influence of lighting and remove unqualified images.
[0048] The preprocessing First_elim submodule for image preprocessing of the calibration image.
[0049] Other steps and parameters are the same as those in Embodiment 1.
specific Embodiment approach 3
[0050] Specific embodiment three: the difference between this embodiment and specific embodiment one or two is that the system calibration module Calibration includes:
[0051] The calibration display Calib window submodule for displaying the calibration board picture to be calibrated;
[0052] Left camera calibration Left_calib submodule used to calibrate the left camera;
[0053] The right camera calibration Right_calib submodule used to calibrate the right camera;
[0054] Stereo calibration Stereo_calib submodule for stereo calibration;
[0055] The output Exit sub-module used to exit the interface and save the calibration results after the calibration is completed.
[0056] Other steps and parameters are the same as those in Embodiment 1 or Embodiment 2.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More