

Positioning and surrounding control method for multi-agent system in three-dimensional space
A multi-agent system, three-dimensional space technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., to achieve the effect of wide application prospects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0050] For the convenience of description, the relevant technical terms appearing in the specific implementation are explained first:
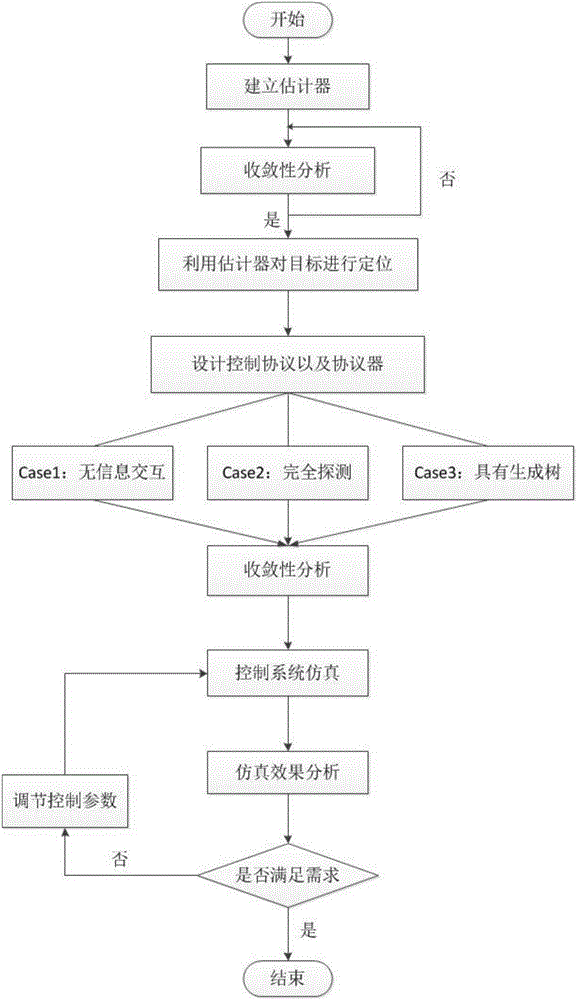
[0051] The invention establishes the positioning and surrounding control scheme of the intelligent body system for the unknown target which can only know the orientation information in the three-dimensional environment. The present invention establishes three surround algorithms, the first algorithm is realized with communication, and the other two are realized without communication.
[0052] Among them, the first algorithm assumes that the orientation information can be shared among neighbor individuals, and the algorithm can be used to realize the agent system surrounding the target in different orbits. The second algorithm does not require communication between agents, but requires each agent to be able to obtain the azimuth angle of other agents. This algorithm can realize that the agent system surrounds the target in the same orbit. With ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More