Touch control method, touch frame and intelligent pen
A technology of a smart pen and a touch frame, applied in the field of human-computer interaction, can solve the problems of not being able to touch small touch objects and cannot provide absolute position information, and achieve the effect of high touch experience
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
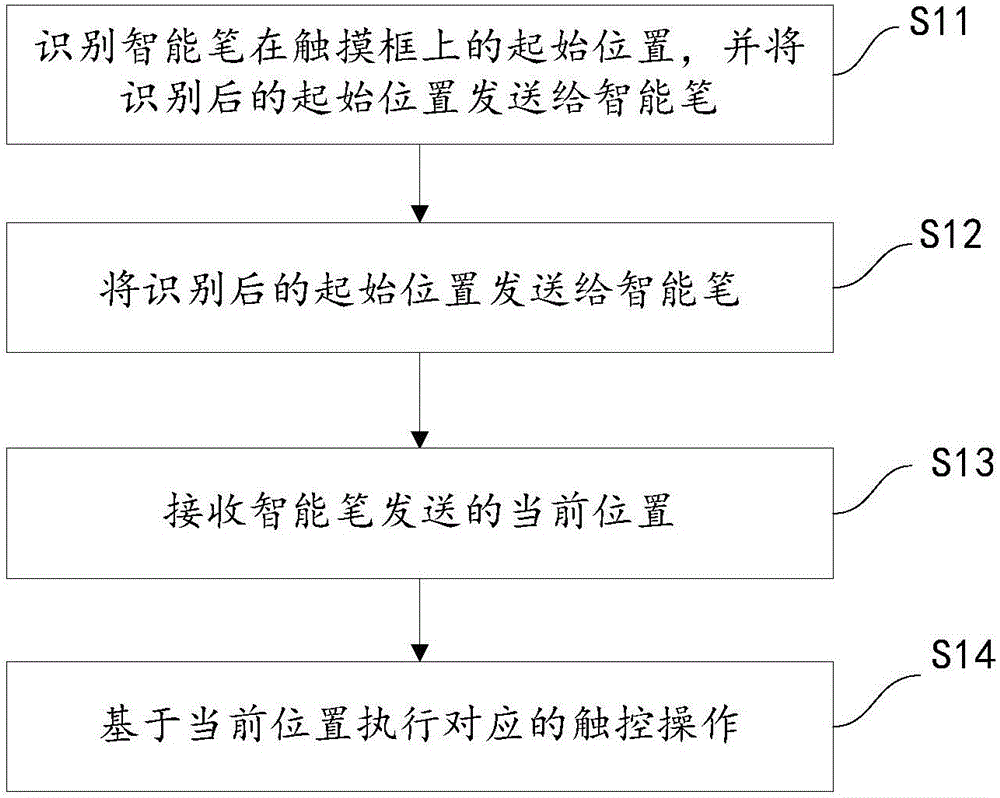
[0071] see figure 1 , figure 1 It is a schematic flow chart of Embodiment 1 provided by a touch control method of the present invention. Embodiment 1 includes:
[0072] S11. Identify the starting position of the smart pen on the touch frame;
[0073] S12. Send the identified starting position to the smart pen;
[0074] S13. Receive the current position sent by the smart pen; wherein, the current position is the position calculated by the smart pen according to the starting position and the movement data, and the movement data is the data of the movement of the smart pen on the touch frame identified by the smart pen;
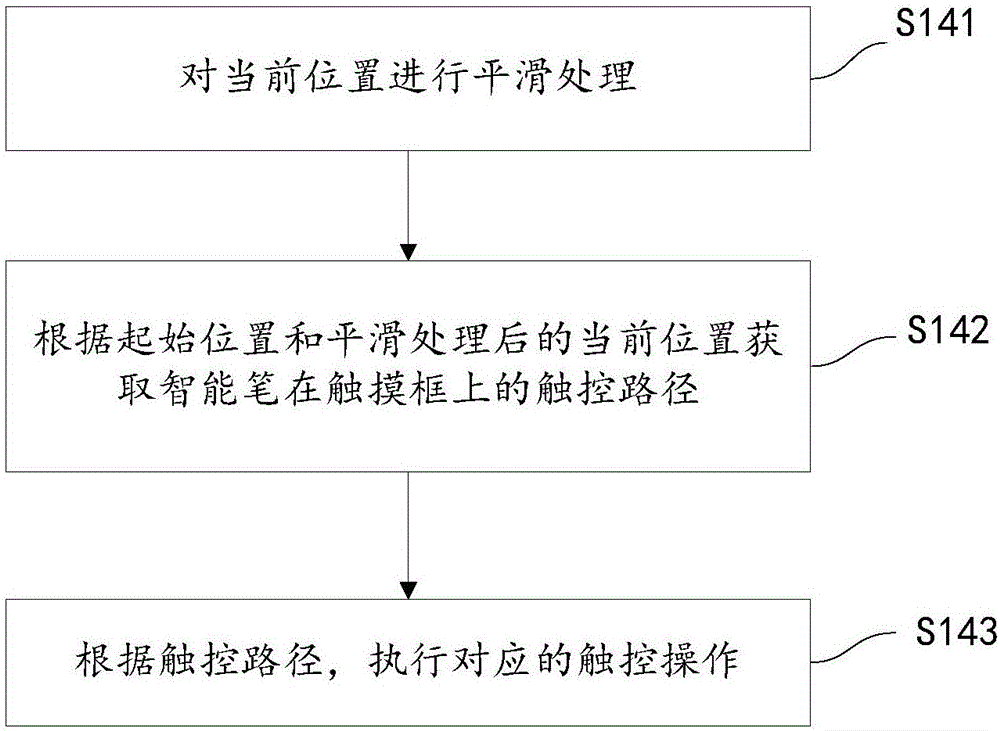
[0075] S14. Execute a corresponding touch operation based on the current position.
[0076] Before step S11, the first embodiment also includes a preset step S10, and step S10 includes:
[0077] S10. When detecting that the smart pen enters the touch area or receiving a signal actively sent by the smart pen when entering the touch area, generate trigger info...
Embodiment 2
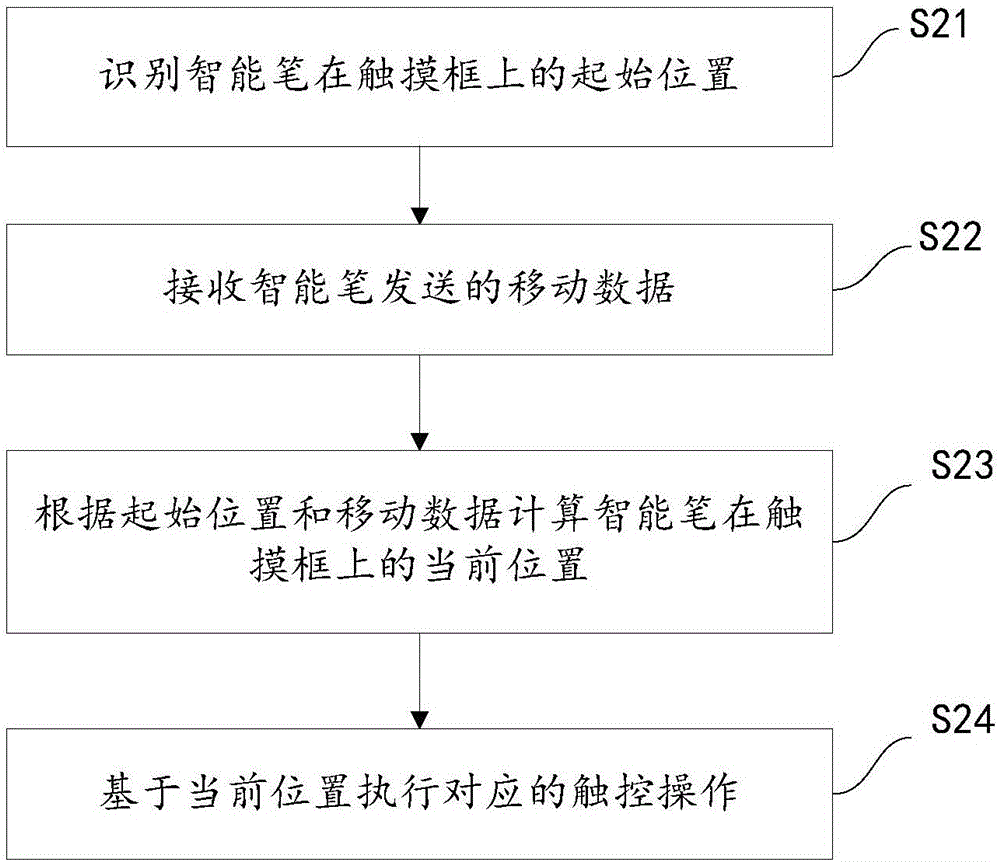
[0088] see image 3 , image 3 It is a schematic flowchart of Embodiment 2 of a touch method provided by the present invention; Embodiment 2 includes:
[0089] S21. Identify the starting position of the smart pen on the touch frame;
[0090] S22. Receive the movement data sent by the smart pen; wherein, the movement data is the data of the movement of the smart pen on the touch frame identified by the smart pen;
[0091] S23. Calculate the current position of the smart pen on the touch frame according to the starting position and the movement data;
[0092] S24. Execute a corresponding touch operation based on the current position.
[0093] Before step S21, the first embodiment also includes a preset step S20, and step S20 includes:
[0094] S20. When detecting that the smart pen enters the touch area or receiving a signal actively sent by the smart pen when entering the touch area, generate trigger information; wherein the trigger information is used to trigger acquisitio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com