

Sanitation robot capable of automatically unloading garbage and control method thereof
A robot and automatic unloading technology, which is applied in the field of robots, can solve the problems of inability to realize automatic dumping of garbage, low efficiency of garbage cleaning by hand-held sanitation machines, and inability to clean, etc., achieving simple structure, fast speed, and fast cleaning speed Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] Embodiments of the technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings. The following examples are only used to illustrate the technical solutions of the present invention more clearly, and therefore are only examples, rather than limiting the protection scope of the present invention.
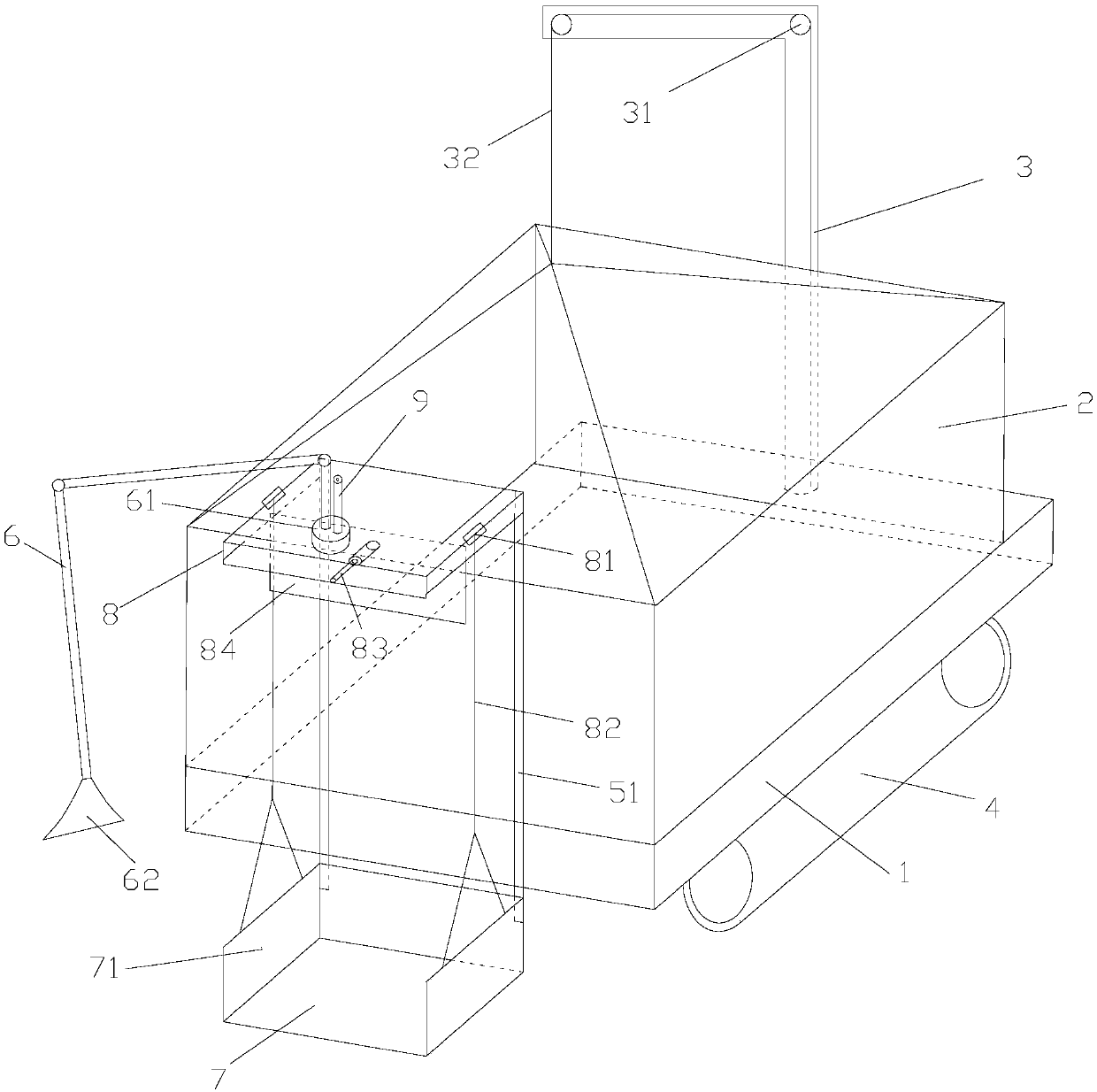
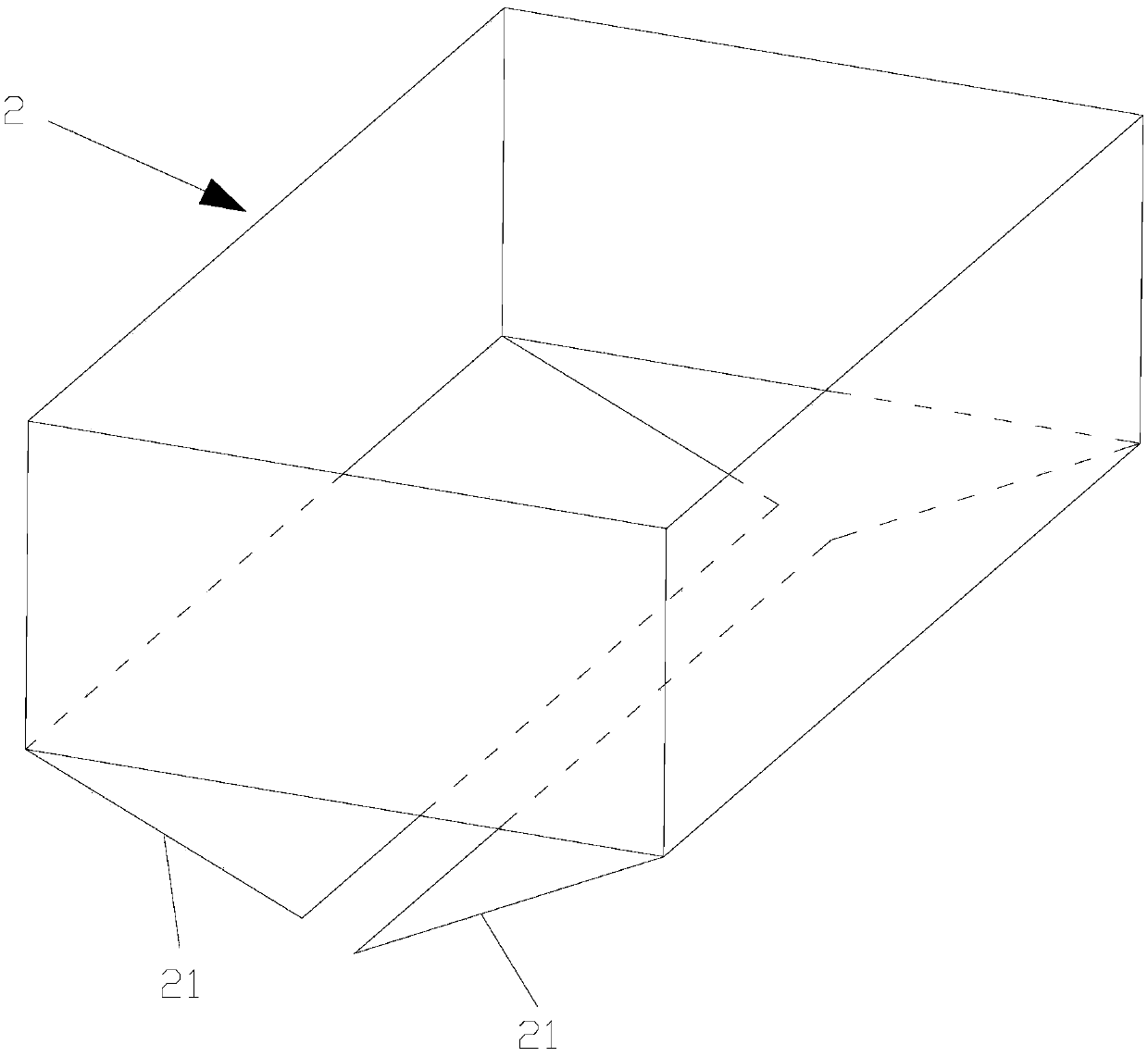
[0044] First aspect, such as Figure 1 to Figure 2 As shown, the embodiment of the present invention provides a sanitation robot capable of automatically unloading garbage, including a chassis 1, a garbage box body 2, a hanger 3, a moving mechanism 4, a mounting frame 5, a mechanical arm 6, a garbage shovel 7 and a transmission mechanism ; The moving mechanism 4 is driven by a drive motor and installed below the chassis 1; the garbage box body 2 is arranged on the chassis 1, and the bottom of the garbage box body 2 is provided with two openable bottom plates 21 and a servo motor for controlling the opening and clos...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More