

Lifting garbage conveying sanitation robot and control method thereof
A control method and robot technology, applied in the field of robots, can solve the problems of picking up, difficult garbage, and difficult to suck up garbage, and achieve the effects of high speed, improved cleaning efficiency and high efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The embodiments of the technical solution of the present invention will be described in detail below in conjunction with the accompanying drawings. The following embodiments are only used to explain the technical solutions of the present invention more clearly, and therefore are only used as examples, and cannot be used to limit the protection scope of the present invention.
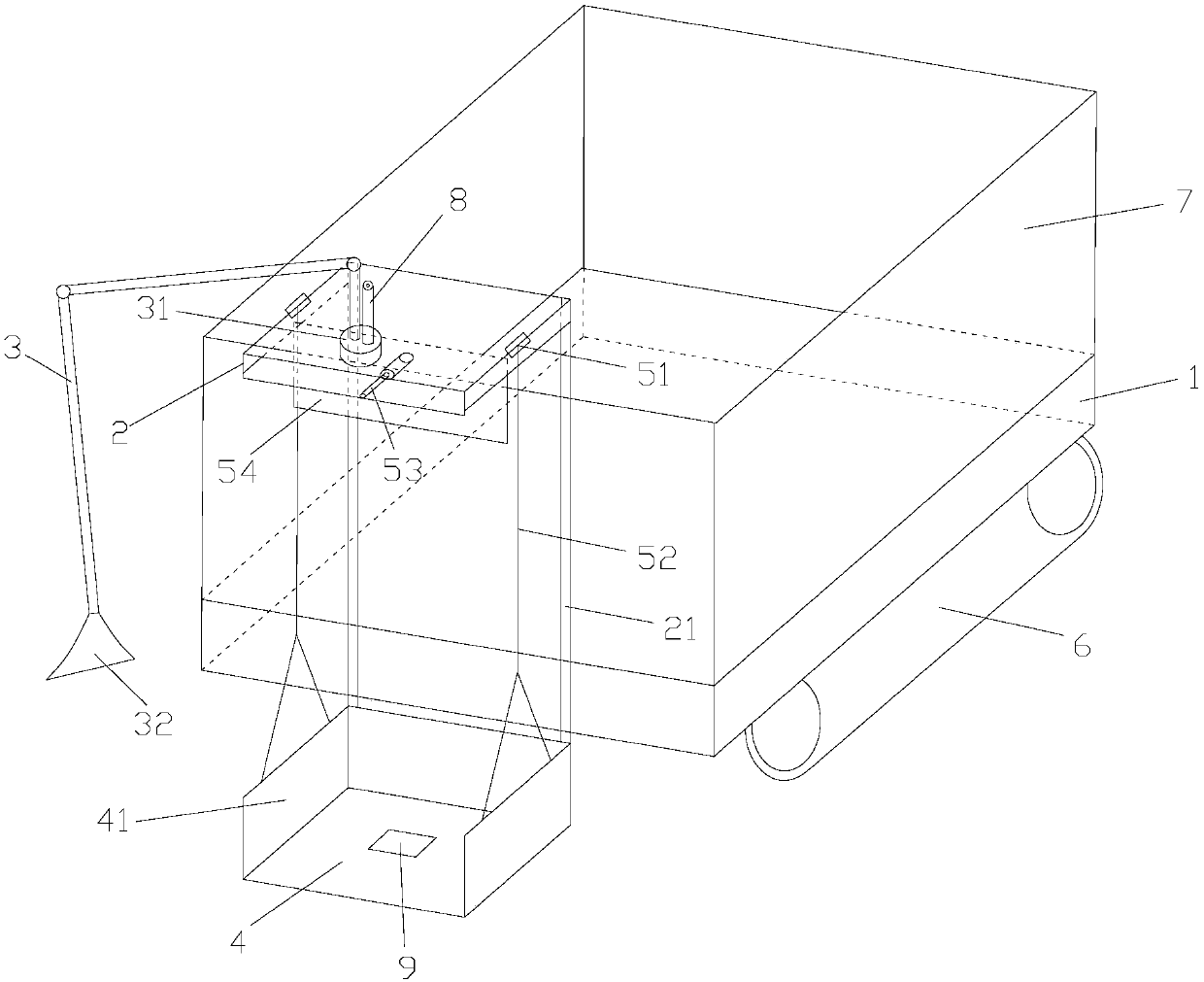
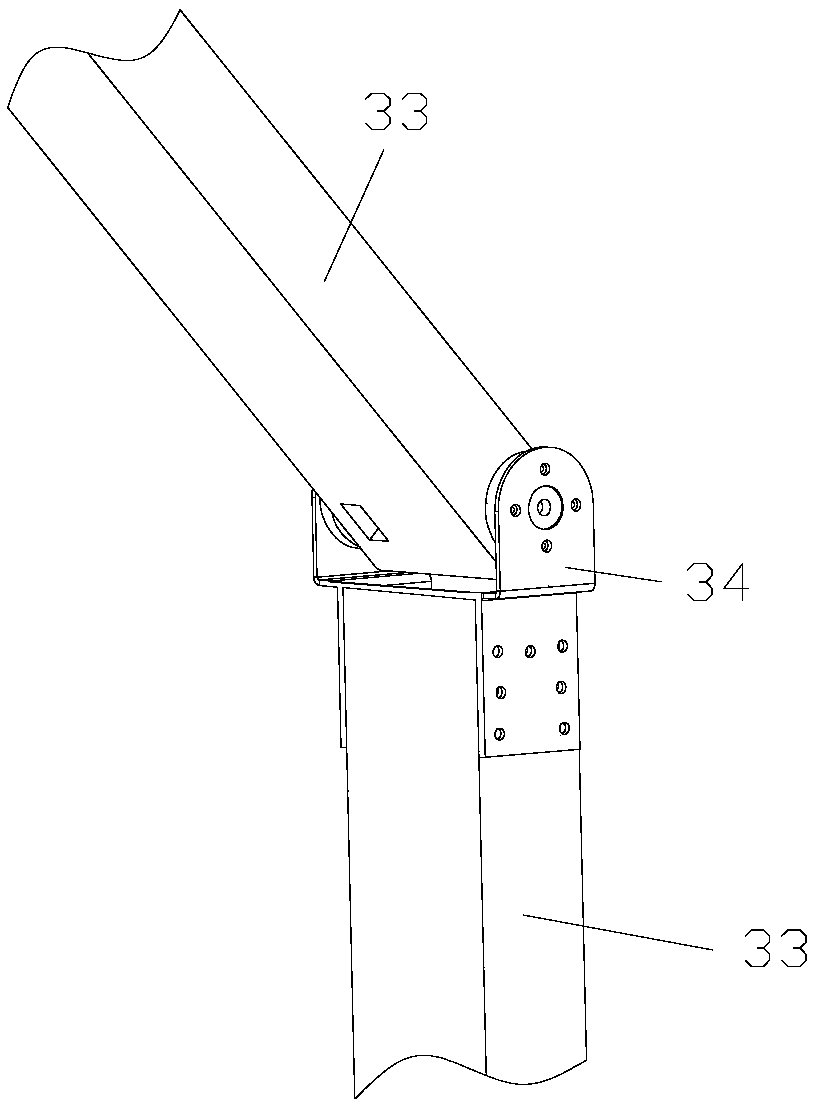
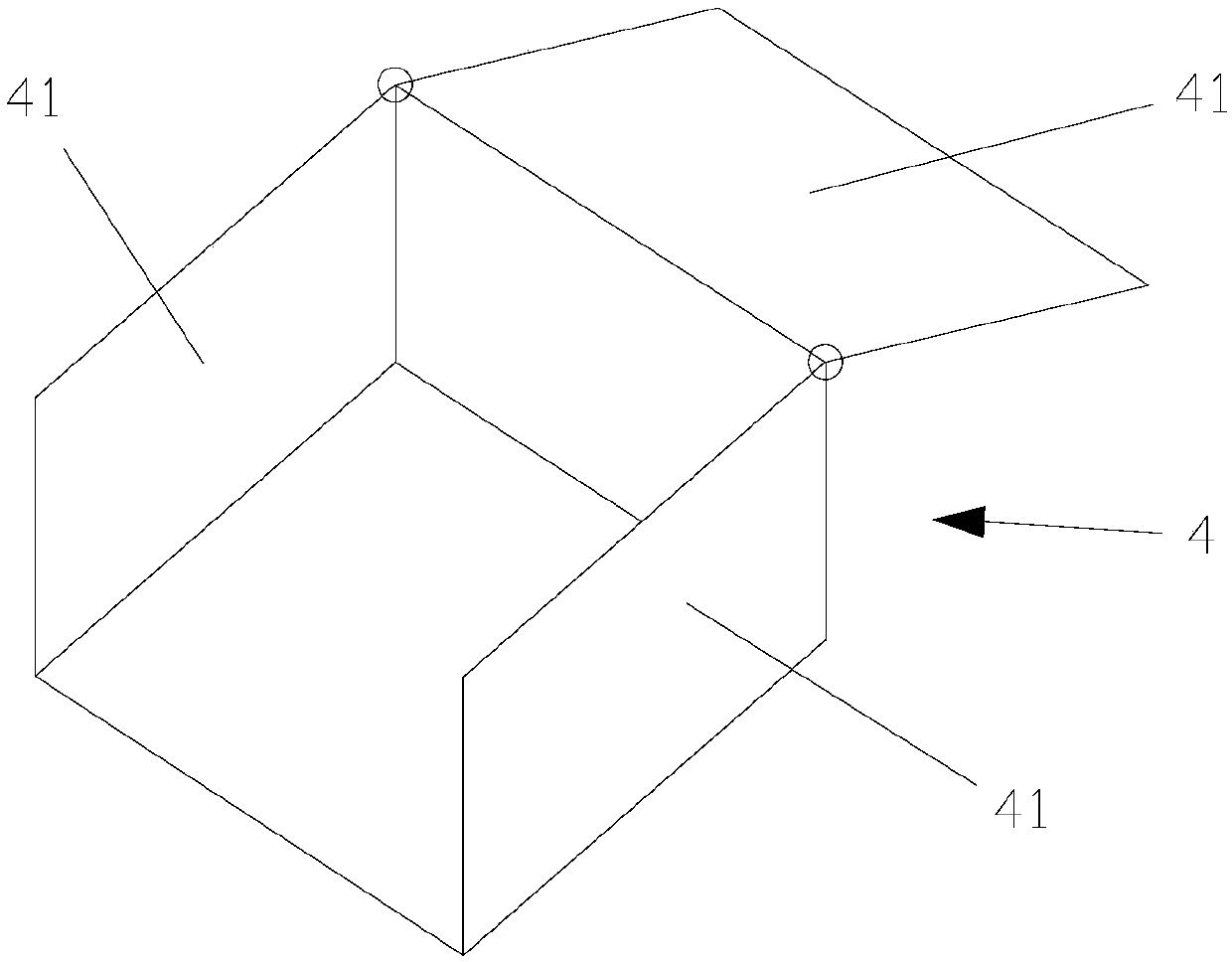
[0035] The first aspect, such as figure 1 As shown, the embodiment of the present invention provides an elevating garbage conveying sanitation robot, including a chassis 1, a mounting frame 2, a mechanical arm 3, a garbage shovel 4, a conveying mechanism, a battery, and a host. The mounting frame 2 is fixed on the support frame 21 The front end of the chassis 1 is located above the chassis, the garbage shovel 4 is located at the front end of the chassis 1, and the support frame 21 is blocked behind the garbage shovel 4 to prevent the garbage shovel from shaking; a moving mechanism 6 driven by a drivin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More