

AGV scheduling method realized through uploading task file
A task file and scheduling method technology, applied in control/regulation systems, two-dimensional position/channel control, vehicle position/route/altitude control, etc., can solve problems such as difficulty in implementing targeted scheduling schemes and achieve scheduling Flexible and cost-saving effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
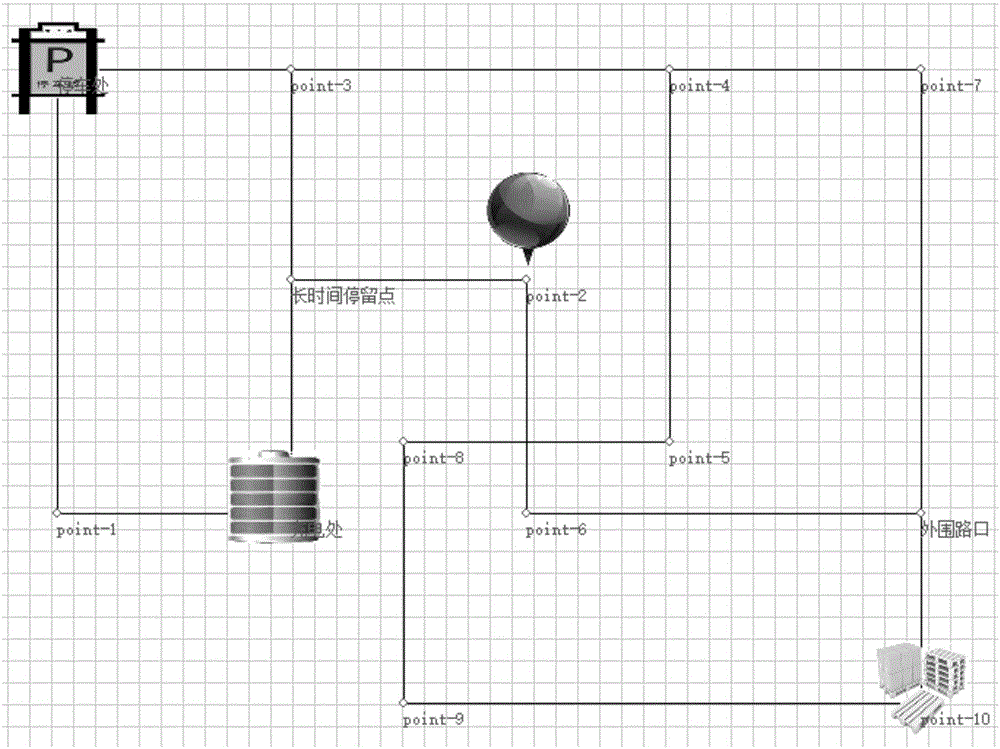
[0040] Such as figure 1 As shown, it is a schematic structural diagram of the system applied to the AGV scheduling method of the present invention, including a magnetic navigation track and multiple AGVs, wherein the AGVs are only displayed on the map when performing tasks.
[0041] This embodiment provides an AGV scheduling method realized by uploading task files, the flow chart of the method is as follows Figure 6 As shown, the method includes the following steps:
[0042] Step 1. Embedding RFID tags on all nodes of the magnetic navigation track and all nodes where the AGV may stay or perform task operations;
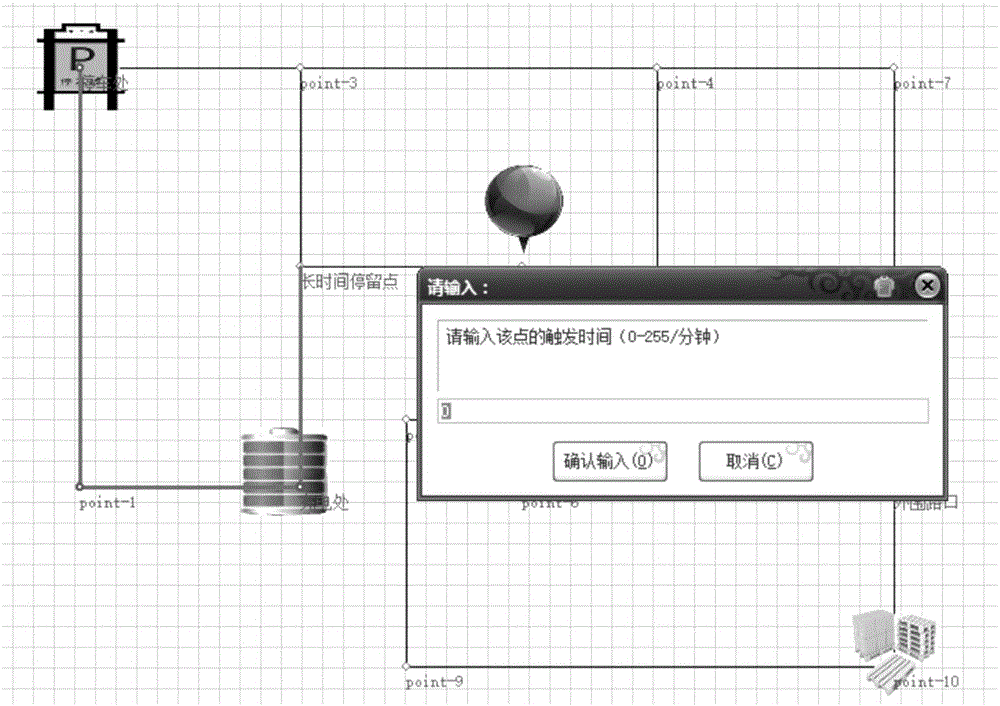
[0043] Step 2. The upper computer scheduling system writes the RFID number contained in the selected task route and the set parameters into the task file, and uploads the task file to the AGV through wireless communication. The parameters set in determine whether the location is correct, and execute the specified task.
[0044] Such as figure 2As shown, by selec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More