

Simulation method of Mars object for deep space exploration
A technology for deep space exploration and target simulation, which is applied to the simulation device of space navigation conditions, space navigation equipment, transportation and packaging, etc., and can solve the problems that Mars body simulation has not yet appeared in engineering practice.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
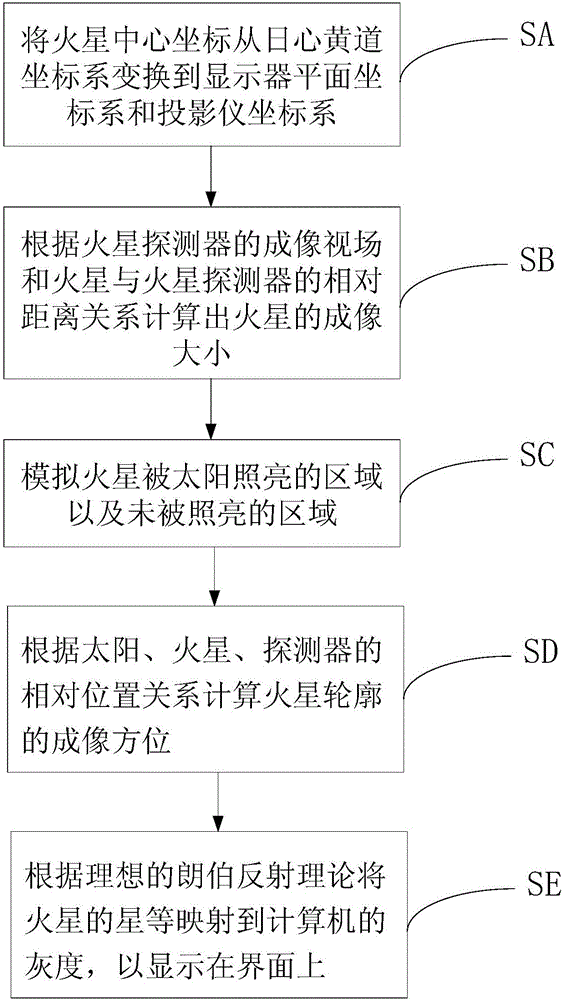
[0025] Specific implementation mode one: the Mars target simulation method for deep space exploration of the present implementation mode, such as figure 1 As shown, it includes Mars coordinate simulation step SA, Mars imaging size simulation step SB, Mars imaging contour simulation step SC, Mars imaging orientation simulation step SD and Mars imaging grayscale simulation step SE: among them,
[0026] The Mars coordinate simulation step SA is used to transform the center coordinates of Mars from the heliocentric ecliptic coordinate system to the display plane coordinate system.
[0027] The Mars imaging size simulation step SB is used to calculate the imaging size of Mars according to the imaging field of view of the Mars probe and the relative distance relationship between Mars and the Mars probe.
[0028] The Mars imaging profile simulation step SC is used to simulate the areas of Mars illuminated by the sun and the areas not illuminated by the sun.
[0029] The Mars imaging...
specific Embodiment approach 2
[0039] Specific embodiment 2: The difference between this embodiment and specific embodiment 1 is that the method further includes a preprocessing step performed before each step, and the preprocessing step is specifically:
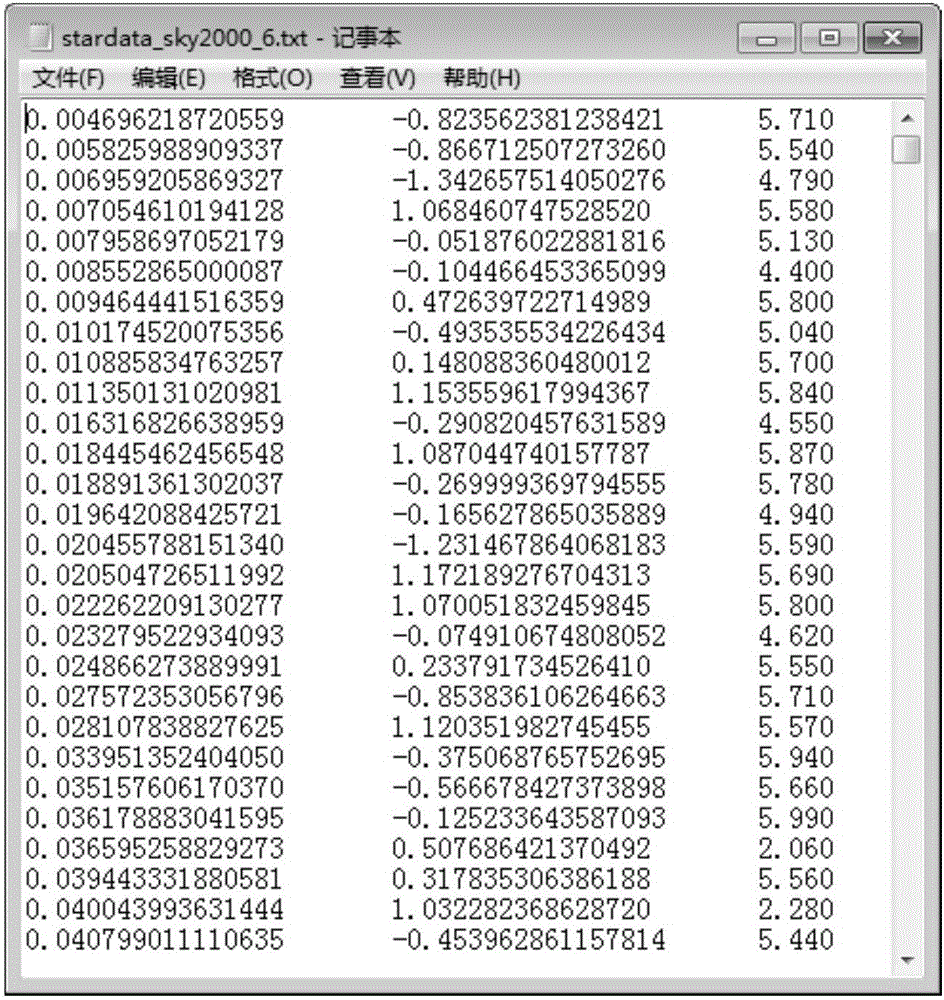
[0040] The parameters in each data item in the SKY2000 star catalog are deleted, and only the parameter information of the star's right ascension, declination, and magnitude of each data item under J2000 is retained, and all data items are as large as Small to arrange.
[0041] figure 2 It is a schematic diagram of SKY2000 simplified star catalog.
[0042] Such as figure 2As shown in the figure, a star catalog is a file in astronomy that records information about stars, positions, and magnitudes. The present invention uses the SKY2000 star catalog, and deletes the star catalog, only retains the magnitude within the range that can be recognized by the human eye, including three parameter information of the right ascension, declination, and magnitude o...
specific Embodiment approach 3
[0044] Specific embodiment three: the difference between this embodiment and specific embodiment one or two is:
[0045] The Mars coordinate simulation steps include:
[0046] Step A1: Determine the center coordinate boresight of the Mars rover.
[0047] Step A2: Convert the attitude quaternion used to describe the Mars rover into the right ascension and declination of the boresight.
[0048] Step A3: Convert the Mars coordinates and the Mars rover coordinates of the heliocentric ecliptic coordinate system under the star catalog into coordinates under the attitude sensor coordinate system.
[0049] Step A4: Determine the center coordinates of Mars in the display plane coordinate system and the projector coordinate system.
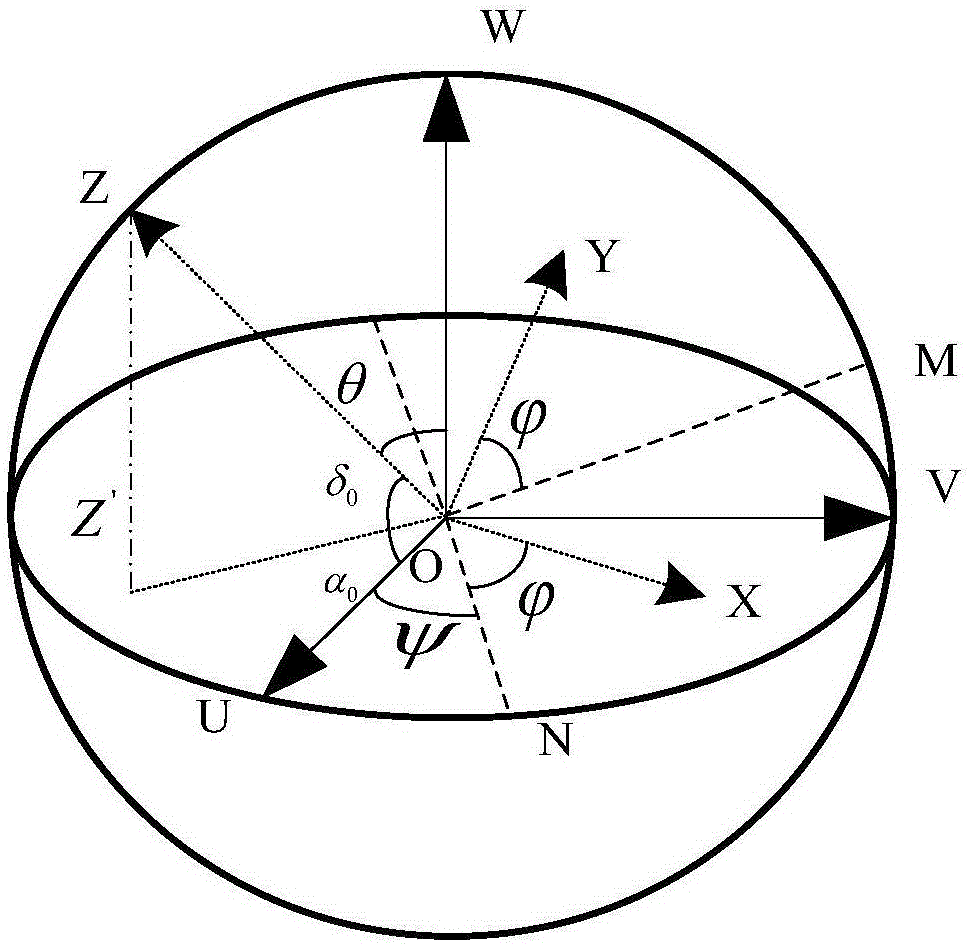
[0050] Specifically, the method for determining the visual axis in step A1 and the determination method for the expressions of right ascension and declination of the visual axis in step A2 are:
[0051] The present invention assumes that the attitude sen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More