

A Quasi-Zero Stiffness Inertial Actuator
A quasi-zero stiffness, actuator technology, applied in the field of inertial actuators, can solve the problems of inability to reach low frequency or even ultra-low frequency, small output of the actuator, and the volume and current intensity of the actuator should not be too large. The effect of low frequency and even ultra low frequency output
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. The following is a preferred embodiment for illustrating the present invention, but not intended to limit the scope of the present invention.
[0028] see Figure 1 to Figure 6 , as shown in the legend there:
[0029] A quasi-zero stiffness inertial actuator comprising:
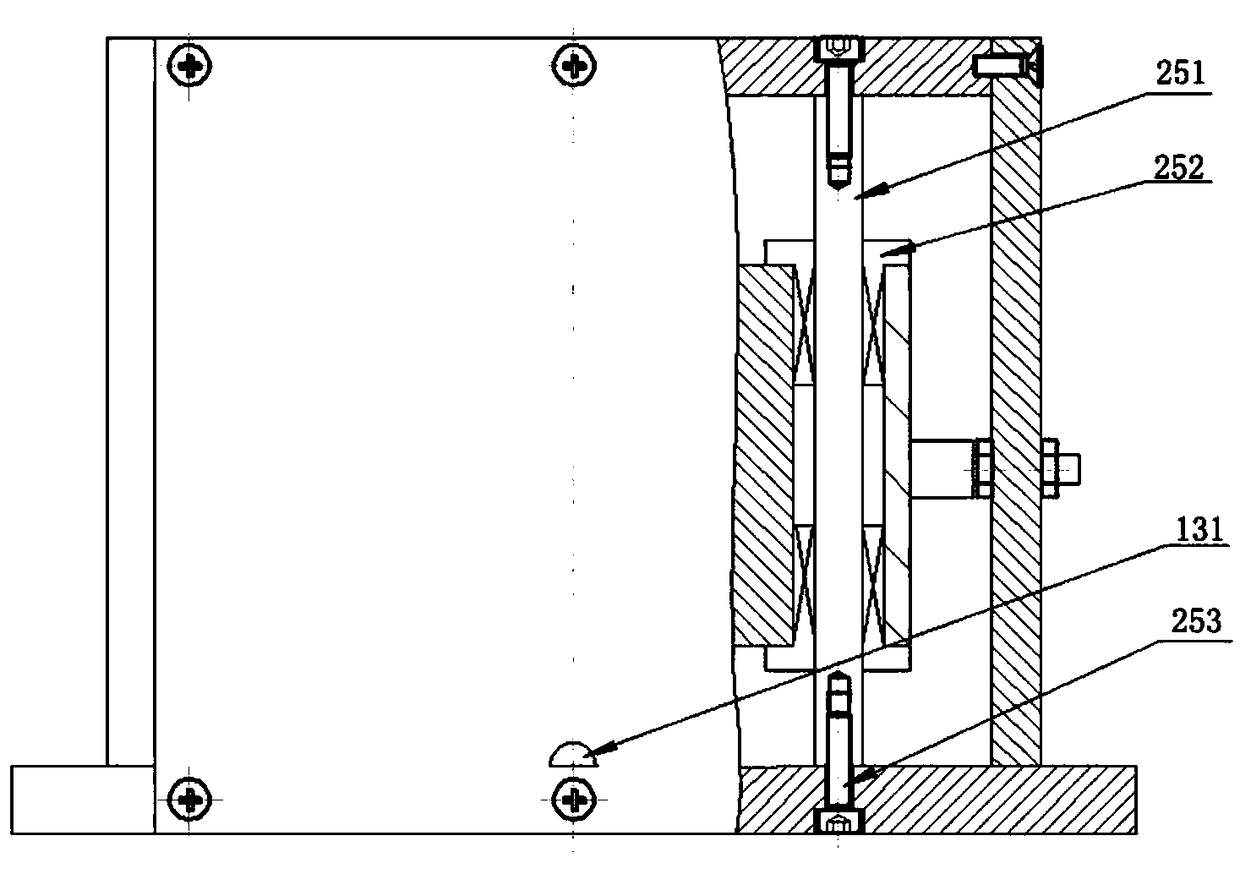
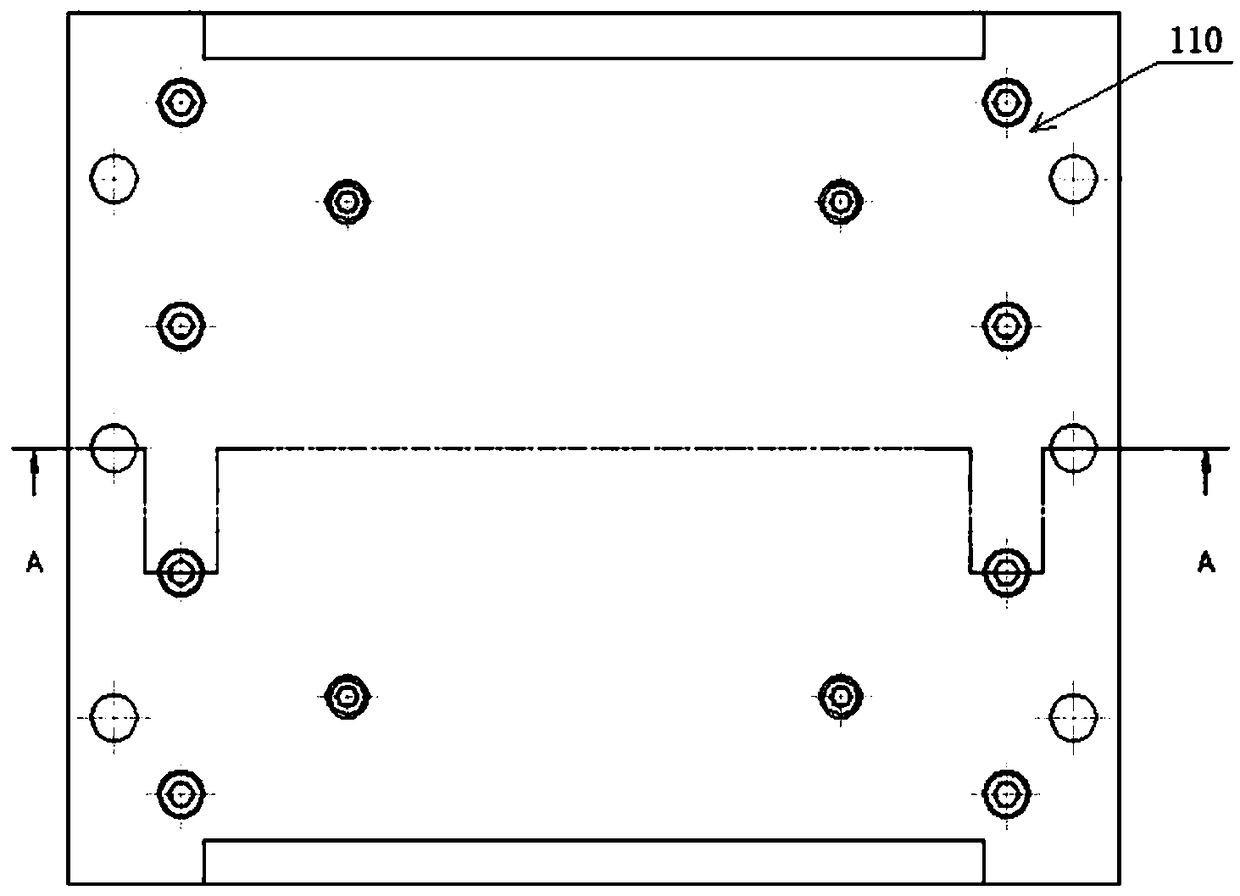
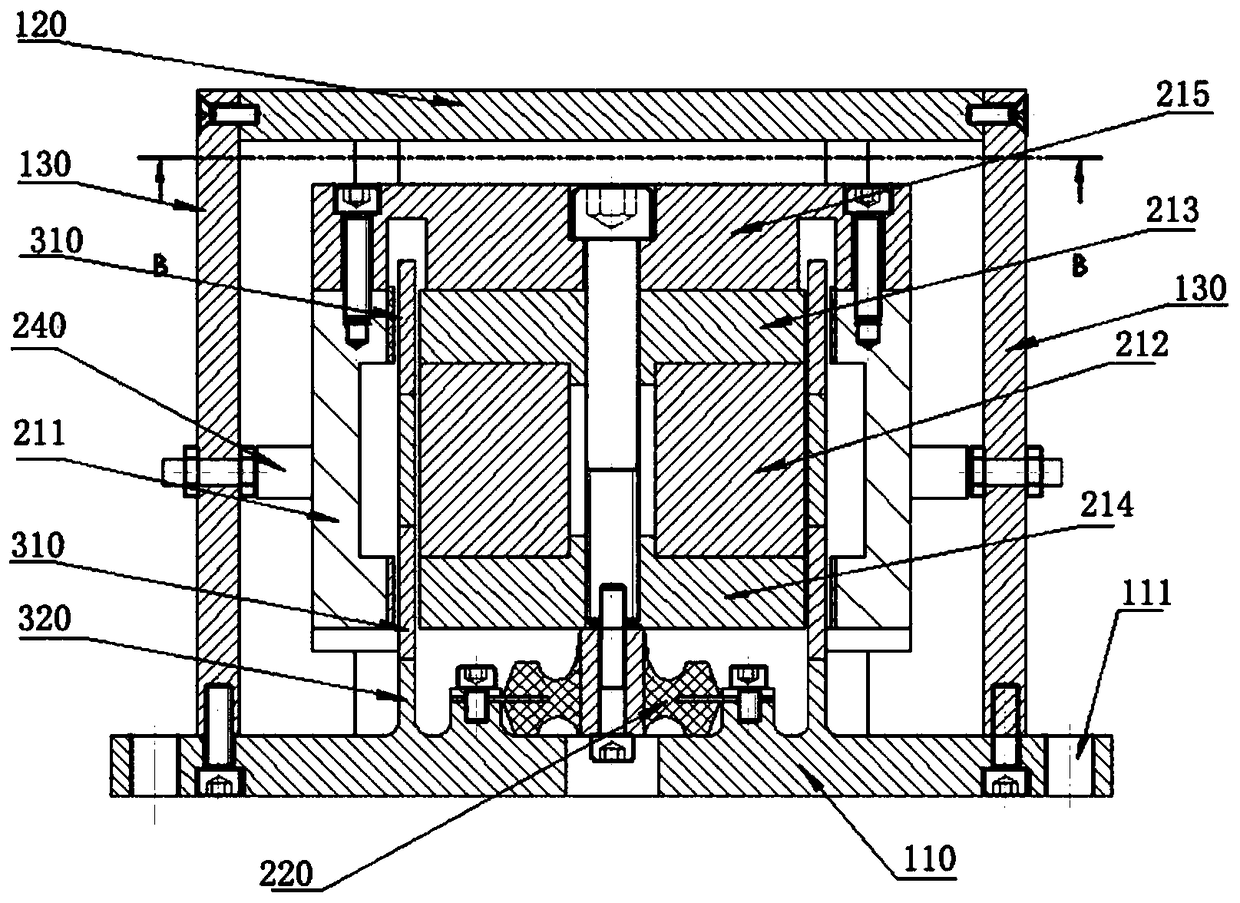
[0030] -The housing, which includes a base 110, an upper end cover 120 and a side wall 130, the base 110 is provided with a connection hole 111 connected to the controlled device, and the side wall 130 is respectively provided with a first interface 131 and a second interface 132;
[0031] - a movable assembly comprising a movable part, a first support part, a second support part and a guide part,
[0032] --Above-mentioned moving part comprises magnetic cylinder 211, is arranged on the permanent magnet 212 in magnetic cylinder 211, is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More