An intelligent remote control adaptive pipeline robot
What is AI technical title?
AI technical title is built by Patsnap AI team. It summarizes the technical point description of the patent document.
A pipeline robot and intelligent remote control technology, which is applied to special pipes, pipe components, mechanical equipment, etc., can solve the problems of complex overall structure and driving principle of pipeline robots, limited flexibility and range of motion of mechanisms, and inability to achieve self-adaptation of pipelines. Achieve high pipeline passing performance and stability, excellent bending performance and stability, and reduce complexity.
Active Publication Date: 2018-05-29
福建巨联环境科技有限公司
View PDF1 Cites 0 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
[0004] The research on pipeline robots at home and abroad has made great progress. The common walking methods are mostly inertial impact walking, creeping crawling, elastic drive walking or wheeled walking, etc. However, through comparative research, it is not difficult to find that the existing pipeline robots The overall structure and driving principle are relatively complex; it cannot be self-adaptive to pipe diameter changes; it needs an external power supply to provide power, which limits the flexibility and range of motion of the mechanism, so it is difficult to be widely promoted and applied
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
Embodiment Construction
[0029] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
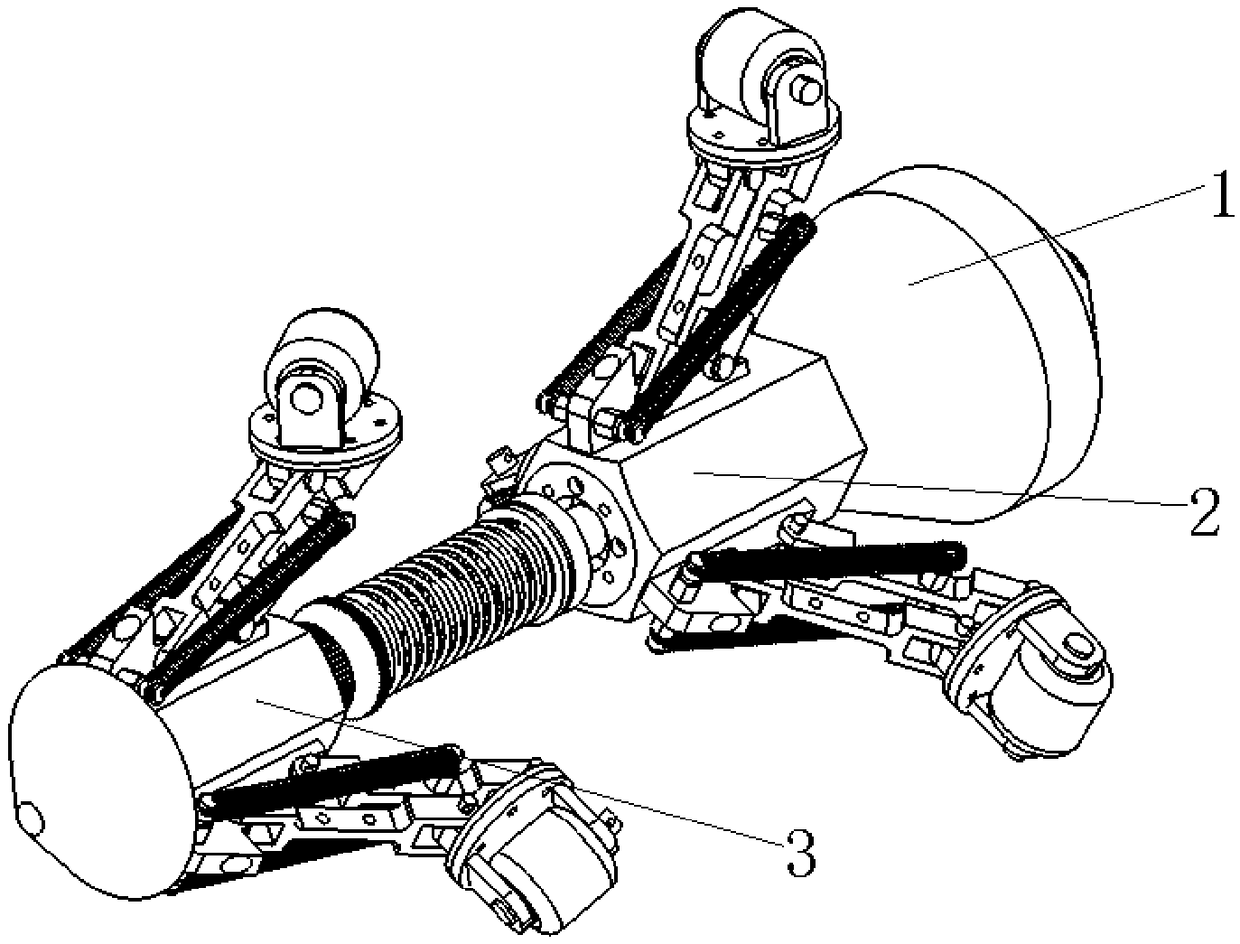
[0030] Such as Figure 1-10 As shown, the present invention provides an intelligent remote control self-adaptive pipeline robot, including: a control guide assembly 1 , a universal transmission assembly 3 and six self-adaptive adjustment bracket assemblies 2 .
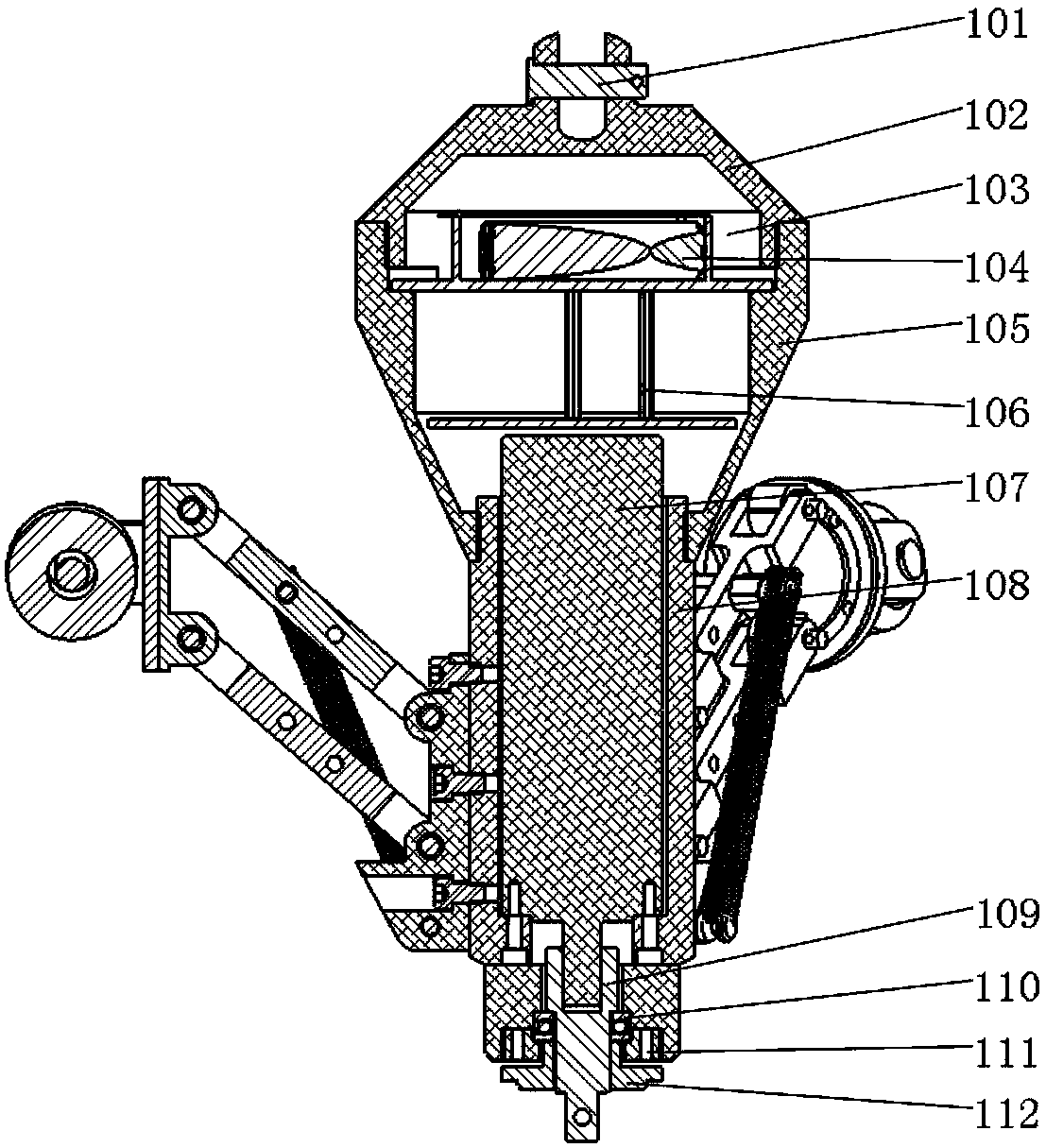
[0031] The control guide assembly 1 includes a traction pin 101, a traction housing 102, a battery box 103, a battery pack 104, a conical adapter housing 105, a circuit board 106, a geared motor 107, a geared motor installation housing 108, and a transmission stepped shaft 109 , Rolling bearing 110, bearing retaining ring 111 and nylon stopper 112.
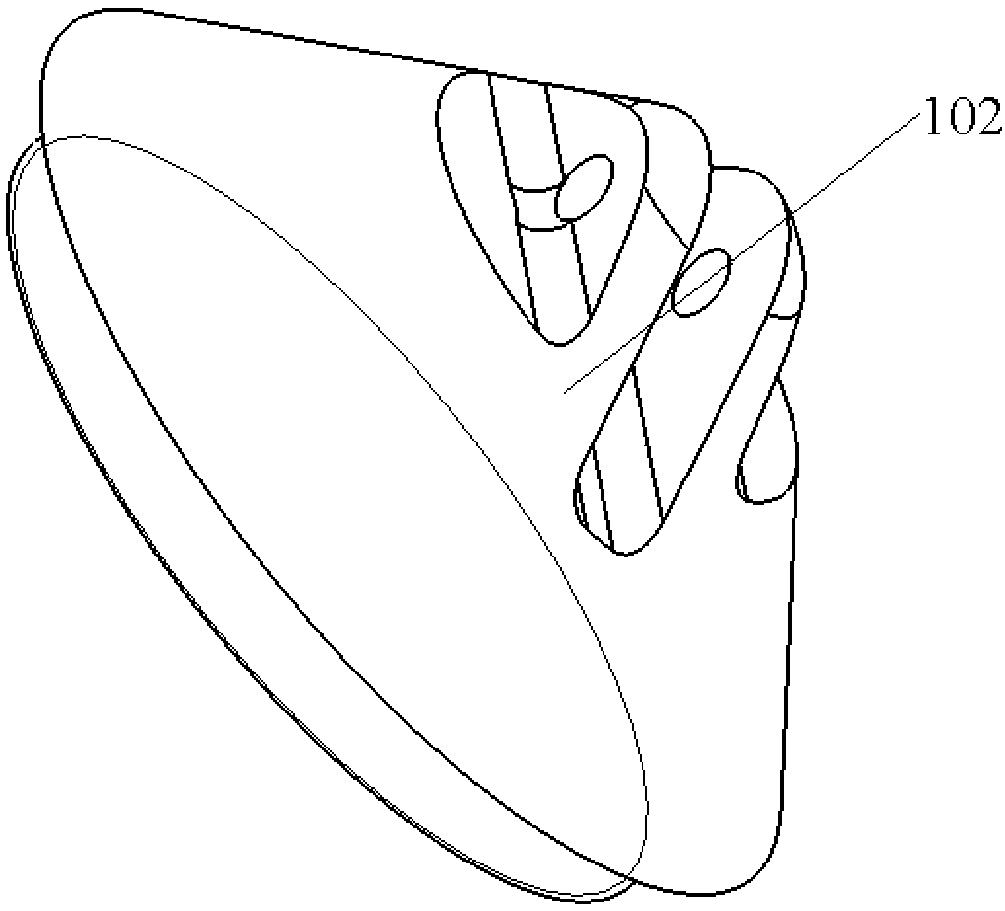
[0032] The main body of the traction housing 102 is conical, the interior is a cavity, and two symmetrical lugs are arranged on the top, and a through hole is arranged on the two lugs, and a hole for installing an external proces...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
The invention provides an intelligent remote control self-adaption pipe robot. The intelligent remote control self-adaption pipe robot comprises a control guide module, an universal transmission module and six self-adaption adjusting bracket modules; the control guide module includes a traction pin shaft, a traction shell, a battery box, a battery set, a conical adaptershell, a circuit board, a speed reducing motor, a speed reducing motor mounting shell, a transmission step shaft, a rolling bearing, a bearing retainer ring and a nylon stopper; the universal transmission module includes a damping spring, an universal joint, a spring pretightening hand wheel, a hand wheel sleeve, a plane thrust bearing, a transmission shaft, a hexahedron sleeve and a conical flange; and each self-adaption adjusting bracket module includes a polyurethane wheel, a deep groove ball bearing, a polyurethane wheel rotating shaft, a double-lug bracket, a double-lug fixed base, two connecting rods, two spring dowel pins, two springs, a positioning pin shaft and a mounting base. The intelligent remote control self-adaption pipe robot can climb in pipes with different diameters, and is simple in structure, excellent in flexibility and high in stability.
Description
technical field [0001] The invention belongs to the field of automation equipment, and in particular relates to an intelligent remote control adaptive pipeline robot. Background technique [0002] At present, laser processing technology has been widely used in the fields of laser cladding, welding, heat treatment and cleaning of the inner wall of the pipeline. Relevant patents and documents at home and abroad have a common feature for the technical means of pipeline processing, that is, the laser head spin (focus move on the pipe wall in a circular path) or the pipe spins. These methods have many disadvantages, such as: the movement mechanism that drives the processing head to rotate, and the correspondingly designed laser light path, which makes the overall structure of the processing head complicated. Axis; the relative movement between the focus and the pipe also leads to low laser processing efficiency and uneven processing effects, and the sequential movement of the la...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.



 Login to View More
Login to View More  Login to View More
Login to View More