

Route planning method and system applied to plant protection of unmanned aerial vehicle
A technology of unmanned aerial vehicles and routes, applied in the direction of navigation calculation tools, etc., can solve the problems that the efficiency and quality of route planning are affected by human factors, and cannot realize batch automation processing, etc., so as to improve the efficiency and quality of route planning, and the number of return routes little effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] The present invention will be described below in conjunction with the accompanying drawings and specific embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
[0049] According to an embodiment of the present invention, a route planning method applied to UAV plant protection is provided.
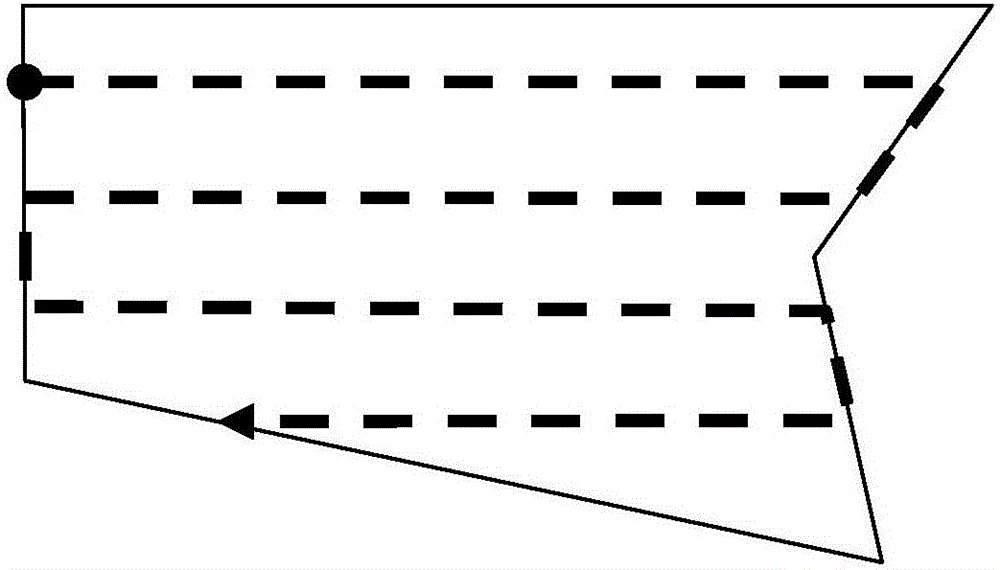
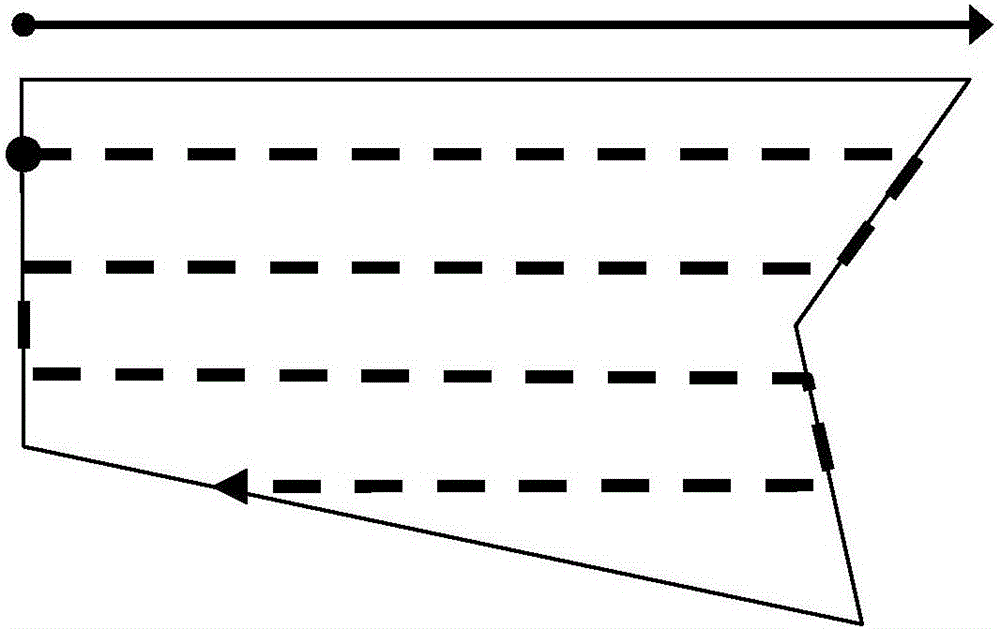
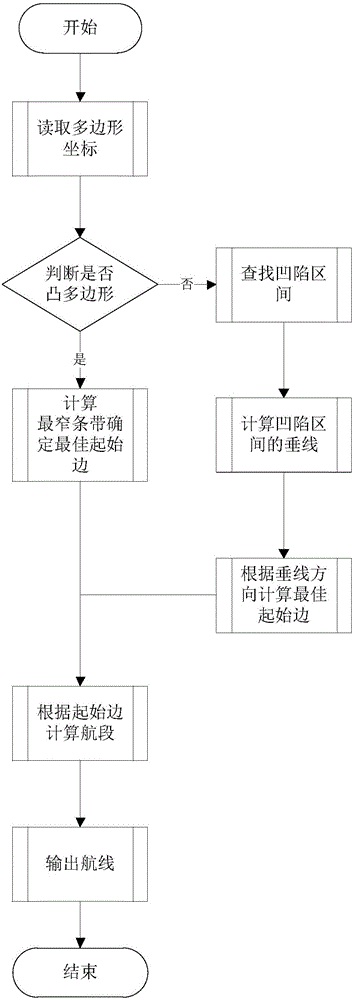
[0050] In a nutshell, the method includes: judging whether the parcel polygon is a convex polygon; if it is a convex polygon, calculating the narrowest strip of the convex polygon to determine the starting side; otherwise, based on the vertical line of the concave interval of the parcel polygon The direction and the length of each side of the parcel polygon determine the starting side (hereinafter also referred to as the optimal starting side); based on this starting side the route is calculated (hereinafter also referred to as the optimal route).
[0051] Combine below ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More