

Method for real-time lane line detection based on vision under complex lighting conditions
A technology for lane line detection and lighting conditions, applied to computer parts, instruments, characters and pattern recognition, etc., can solve the problems of low recognition rate, poor image preprocessing, etc., and achieve the effect of eliminating the influence of light
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0063] In order to explain in detail the purpose and effect achieved by the technical content and structural features of the technical solution, the following will be described in detail in conjunction with specific examples and accompanying drawings.
[0064] 1. General idea
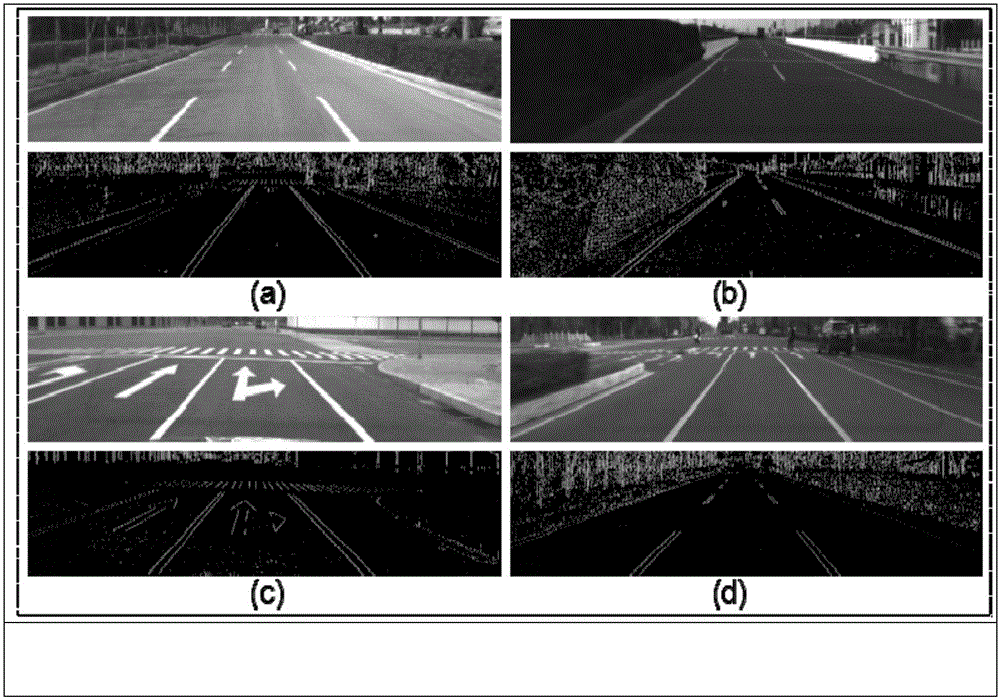
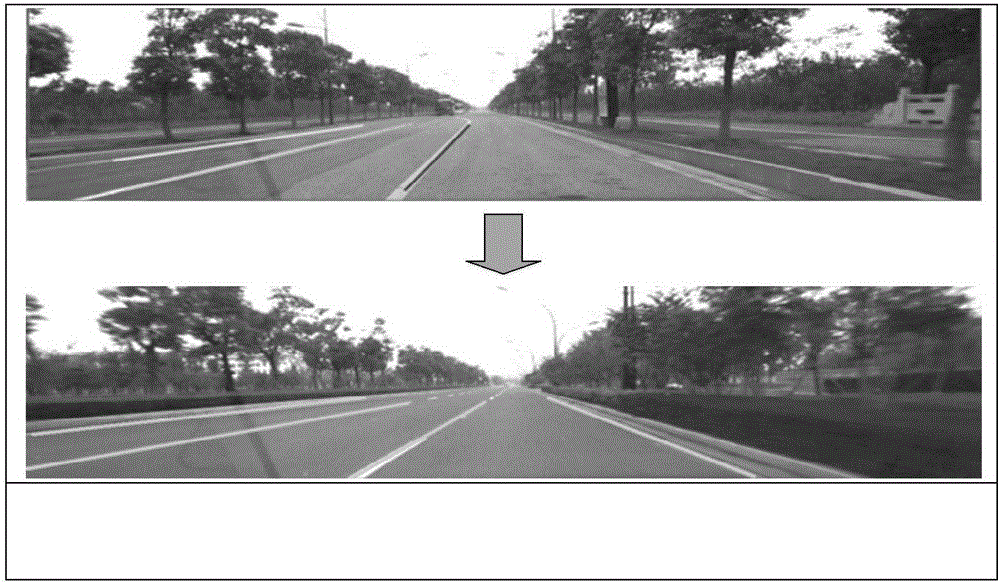
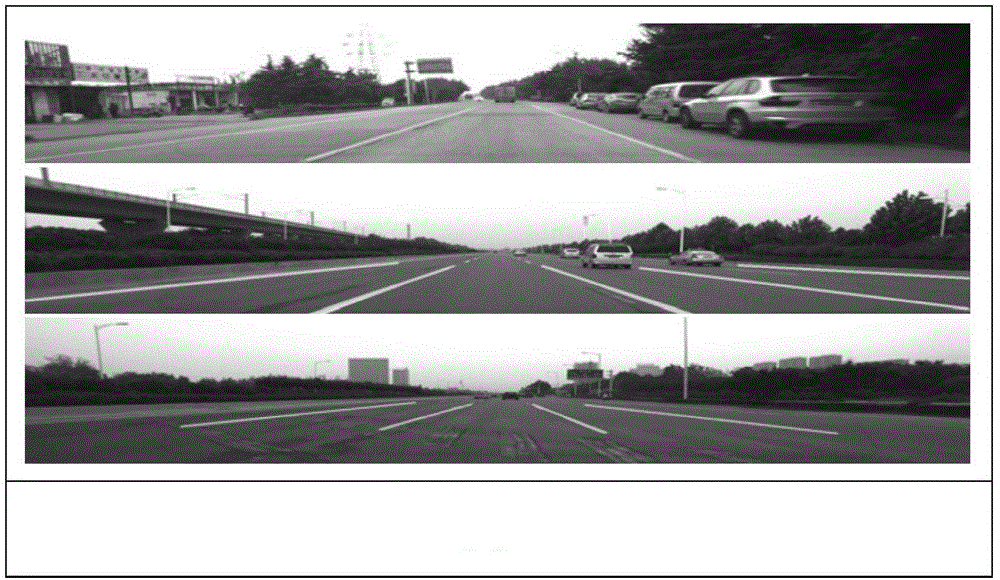
[0065] In order to improve the real-time and reliability of lane marking recognition, a vision-based real-time lane detection algorithm under complex lighting conditions is proposed. During the extraction process, the original image is divided into regions, and then the image is preprocessed with different illumination images for illumination estimation and illumination color correction, so that it can be restored to the standard white light. Gaussian filtering is used to remove the noise introduced in the image acquisition process, and then the image is binarized and edge extracted, and the improved Hough transform is used to obtain the lane candidate line, and the dynamic ROI is established, and the lan...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More