

Modular bionic snake-shaped robot based on RSR configuration parallel mechanisms
A modular, bionic snake technology, applied in the field of bionic robots, can solve problems such as the inability to achieve left-right or sideways swing or linear motion, the insufficient adaptability of the snake-like robot to the terrain, and the invariable length of the snake-like shape of the bionic snake-like robot. , to achieve the effect of various movement modes, increased movement speed and fast movement speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] In order to further understand the invention content, characteristics and effects of the present invention, the following examples are given, and detailed descriptions are as follows in conjunction with the accompanying drawings:
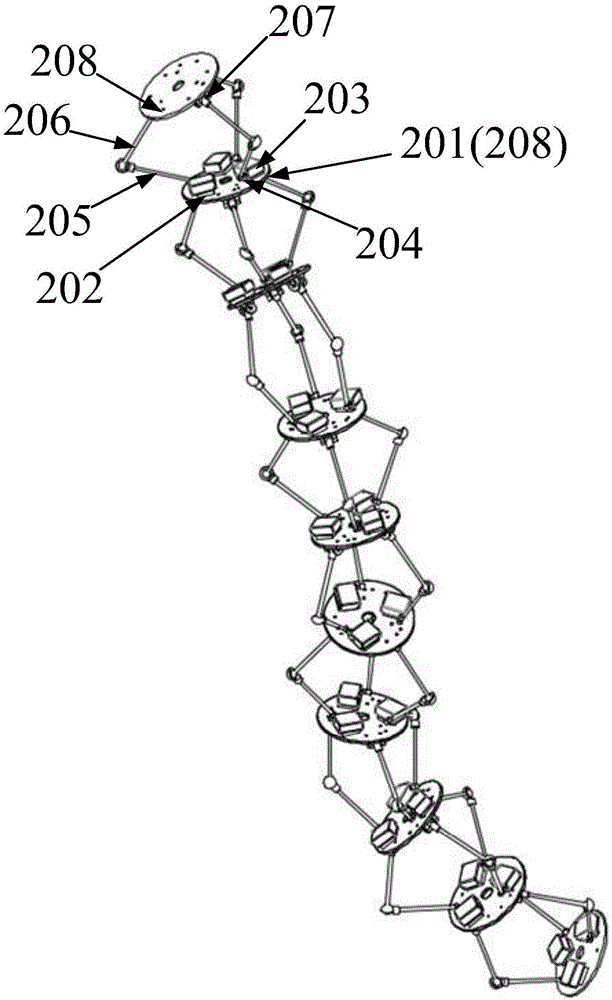
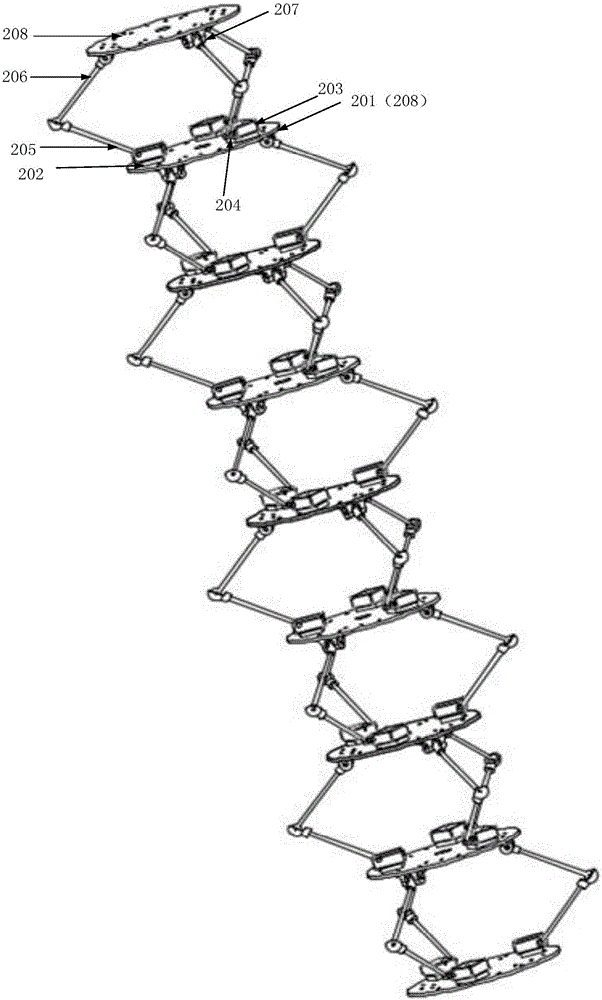
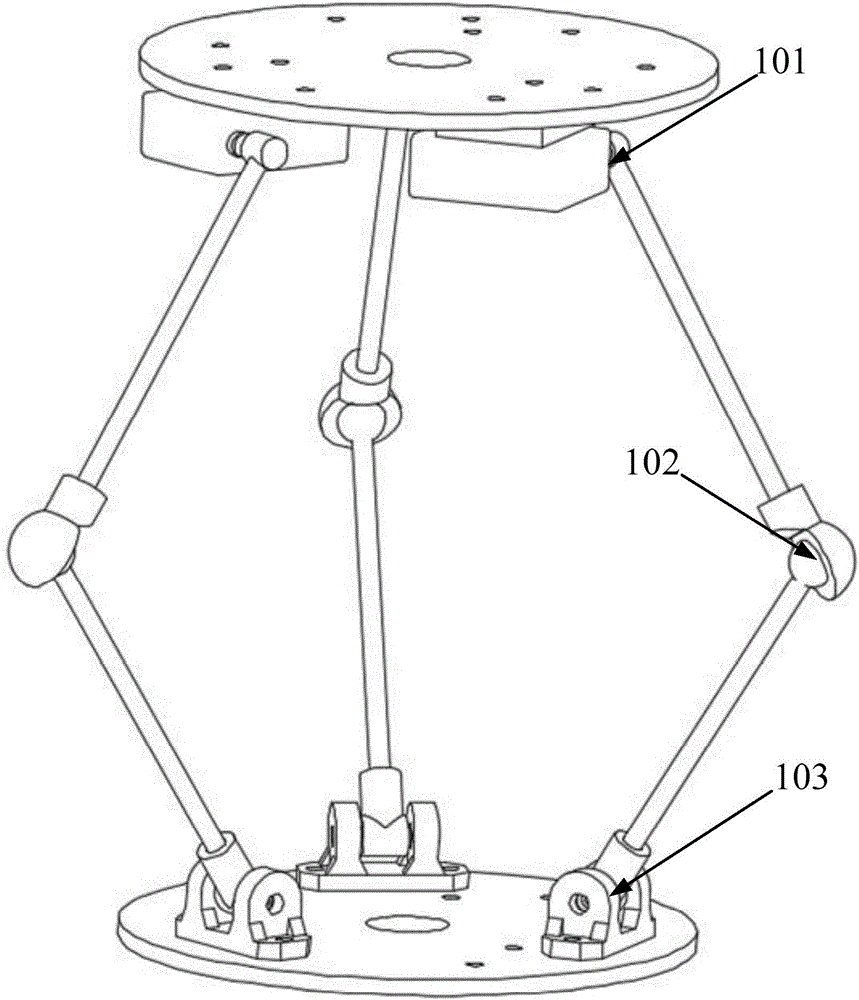
[0029] see Figure 1 to Figure 5 , a modular bionic snake-like robot based on an RSR configuration parallel mechanism, which is composed of a plurality of motion modules with the same structure connected in series, the motion module adopts a parallel mechanism with three degrees of freedom, and the parallel mechanism includes three structures The same RSR series branch chain, static platform 201 and dynamic platform 208 uniformly distributed along the circumferential direction, each of the RSR series branch chains includes a driving device, a driving rod 205 and a driven rod 206, the input end of the driving rod 205 is connected to the The driving device is connected, the driving device is fixed on the static platform 201, the output end of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More