

Disabled-helping advancing lower lib wearable exoskeleton and disabled-helping advancing method thereof
An exoskeleton and lower extremity technology, which can be applied to devices that help people to move around, physical therapy, etc., can solve the problems of inconvenience, the structural design of the disabled wearer is not reasonable and precise, and the economic burden of patients with lower extremity disabilities is increased, so as to improve the comfort level. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
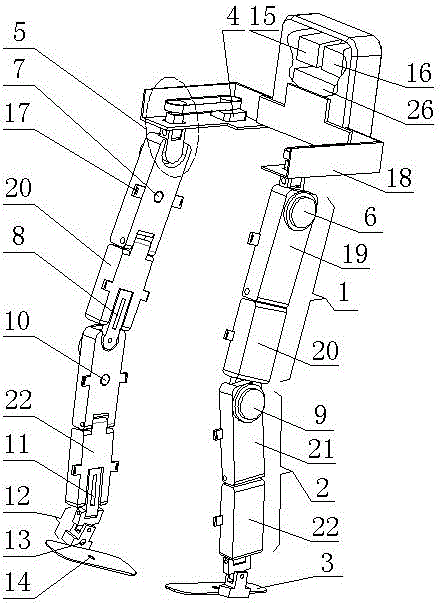
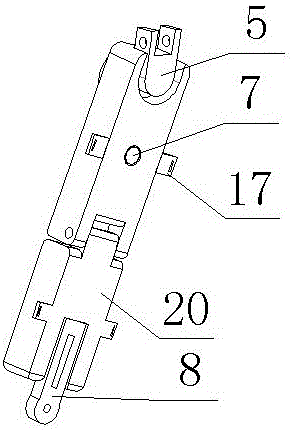
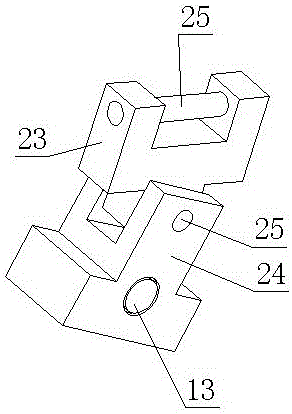
[0030] In this embodiment, the exoskeleton is worn on the lower limbs of the disabled walking, such as Figure 1-Figure 2 As shown, its composition includes: symmetrically arranged thigh joints 1, calf joints 2, and foot support plates 3. The exoskeleton worn by the disabled walking lower limbs also includes a pair of crotch rotation motors 4, crotch rotation joints 5, thigh parts Motor and reducer 6, thigh attitude sensor 7, thigh length adjustment joint 8, lower leg motor and reducer 9, lower leg attitude sensor 10, lower leg length adjustment joint 11, ankle rotation and adduction joint 12, ankle attitude sensor 13 And pressure sensor 14, an attitude sensor 15, a battery 16, a group of strap fixing holes 17 and back beam 18;
[0031] The two thigh joints 1 are connected through the back beam 18 at the position corresponding to the crotch of the human body. The attitude sensor 15 and the battery 16 are installed on the back beam 18. The two sides of the back beam 18 are arra...
specific Embodiment approach 2
[0037] The difference from Embodiment 1 is that the exoskeleton worn by the lower limbs of the disabled walking in this embodiment, such as Figure 1-Figure 2 As shown, the thigh joint 1 also includes a main thigh joint part 19 and a thigh adduction angle adjustment joint 20, the lower end of the main thigh joint part 19 is hinged to the thigh adduction angle adjustment joint 20, and the thigh part length adjustment joint 8 is arranged in the thigh In the guide rail at the end of the angle adjustment joint 20. The present invention adds a thigh adduction angle adjustment joint 20, combined with ergonomics to make the thigh joint 1 part of the exoskeleton worn by the disabled walking lower limbs fit more closely with the wearer's thigh, and combined with the thigh posture sensor 7 to complete the thigh joint 1 in walking tasks in . And the increased thigh adduction angle adjustment joint 20 enables the femoral joint 1 of the exoskeleton worn by the lower limbs of the disabled ...
specific Embodiment approach 3
[0039] The difference from Embodiment 1 or Embodiment 2 is that in this embodiment, the exoskeleton is worn on the lower limbs of the walking aid for the disabled, such as Figure 1-Figure 2 As shown, the calf joint 2 also includes a main calf joint part 21 and a calf adduction angle adjustment joint 22, the lower end of the main calf joint part 21 is hinged to the calf adduction angle adjustment joint 22, and the calf part length adjustment joint 11 is arranged in the calf In the guide rail at the end of the angle adjustment joint 22. The present invention adds a calf adduction angle adjustment joint 22, combined with ergonomics to make the calf joint 2 part of the exoskeleton worn by the disabled walking lower limbs fit more closely with the wearer's thigh, and combined with the calf posture sensor 10, the thigh joint 1 is completed. A task in progress. And the increased calf adduction angle adjustment joint 22 enables the calf joint 2 of the exoskeleton worn by the disable...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More