

Wearable bionic hydraulic mechanical lower limb rehabilitation walking aid
A mechanical device and lower limb technology, applied in the field of wearable bionic hydraulic lower limb rehabilitation and walking aids, can solve the problems of poor human-machine movement coordination and incoherent movement, and achieve the effect of improving fluency and applicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
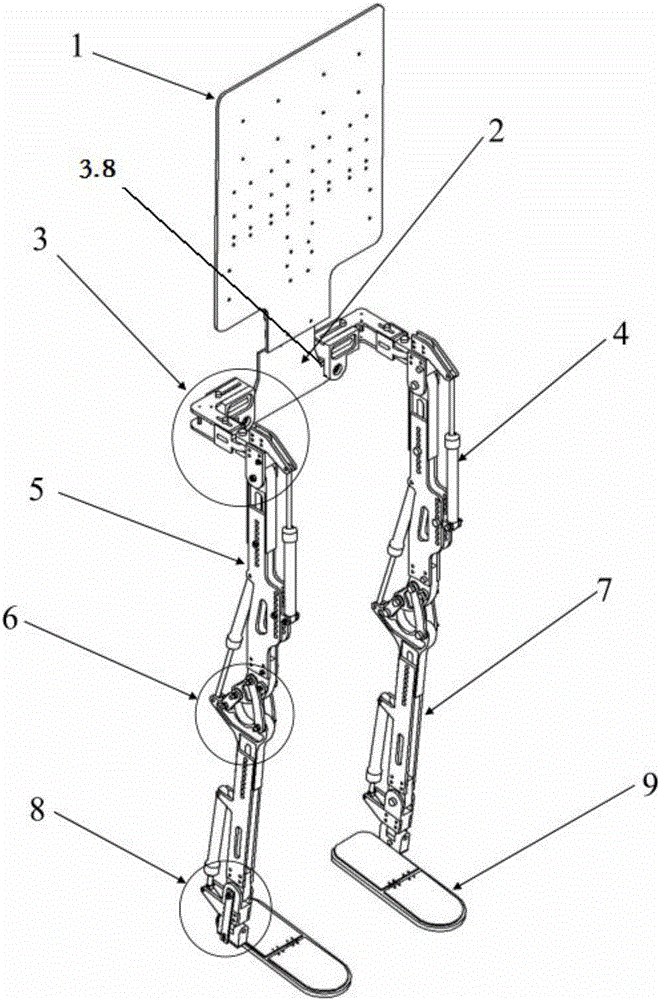
[0025] The present invention will be specifically described below in conjunction with the accompanying drawings. As shown in the figure, the present invention includes a backboard 1, a waistboard 2, a three-axis hip joint 3, a double-acting hydraulic cylinder 4, a thigh main body 5, a bionic link knee joint 6, and a lower leg main body 7 , two-axis ankle joint 8, sole plate 9;
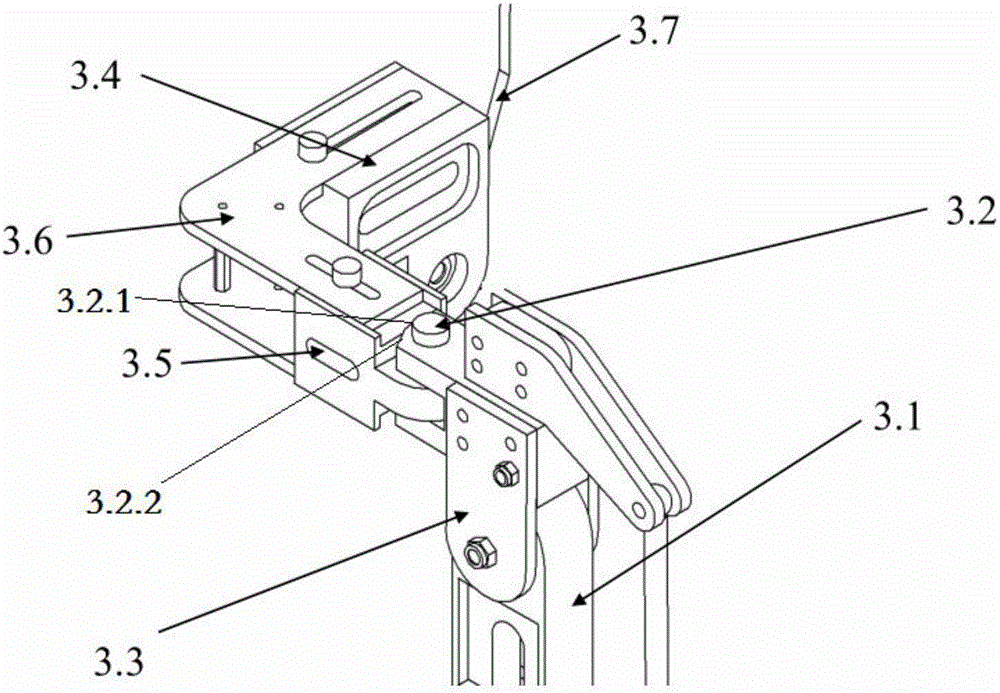
[0026] The three-axis hip joint includes a hip joint adduction / abduction mechanism, a hip joint flexion / extension mechanism and a hip joint internal / external rotation mechanism;
[0027] The adduction / abduction mechanism of the hip joint includes the connecting piece 3.4 of the waist plate 2, the left and right legs, the L-shaped connecting plate 3.6, and joint bearings; The slope 3.7 is set on the side and extends into the groove 3.8 of the connecting piece 3.4 of the left and right legs as a limit structure, and the L-shaped connecting plate is fixed in the slideway of the connecting piece through bo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More