

Steering device of wheeled magnetic attraction wall-climbing robot
A technology of a wall-climbing robot and a steering device, applied in the field of magnetic adsorption, can solve the problems of wheel slippage, inconvenience, large turning space, etc., and achieve the effects of quick turning, small turning area, and increased steering flexibility.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
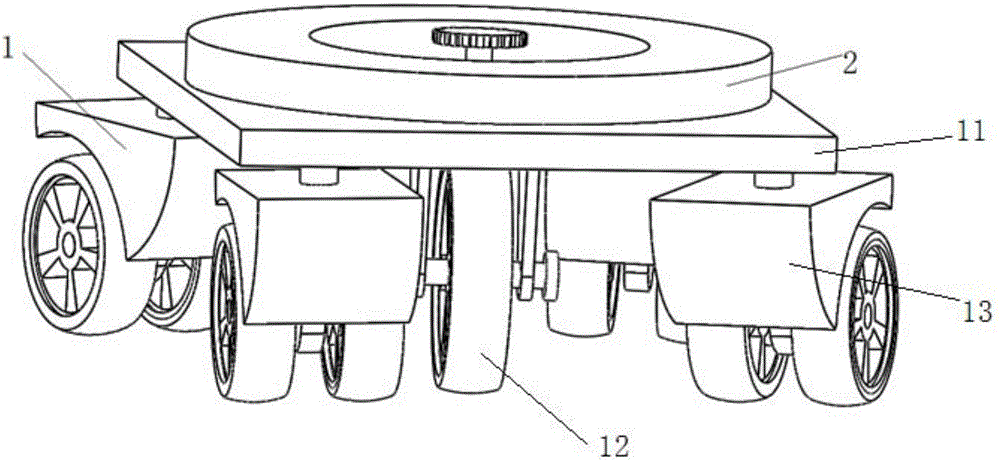
[0024] figure 1 It is a structural diagram of a steering device of a wheeled magnetic adsorption wall-climbing robot, which includes a wheeled combined moving device 1 and a permanent magnetic adsorption device 2;
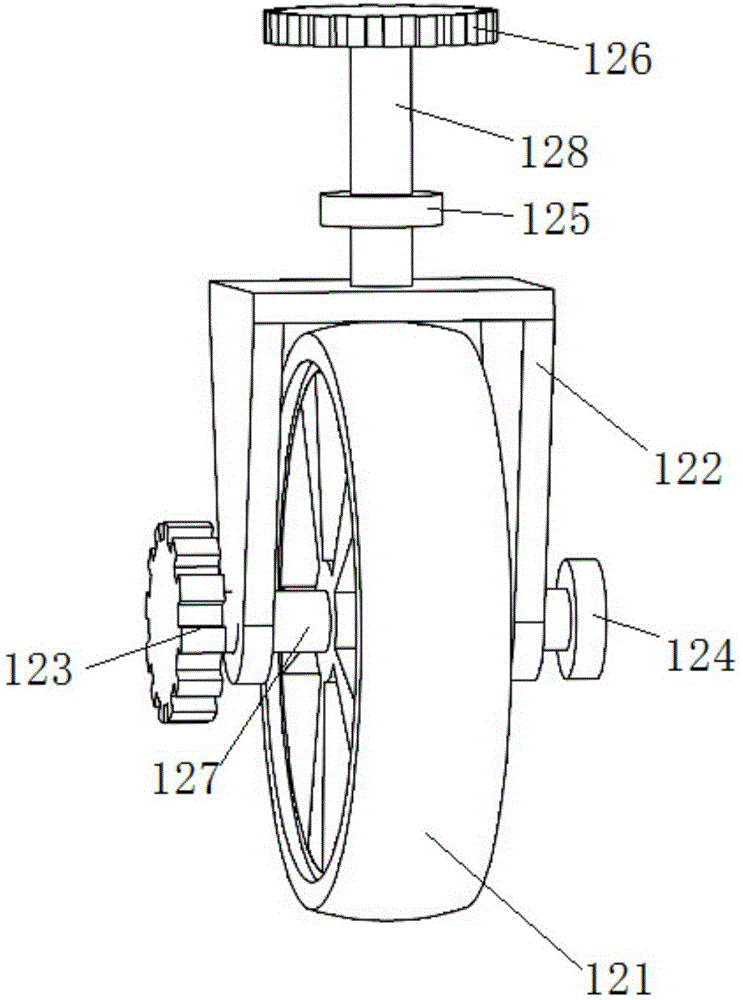
[0025] The wheeled combined mobile device 1 includes a chassis 11, and a central driving wheel 12 and four passive universal wheels 13 respectively mounted on the chassis 11. The central driving wheel 12 can be driven by a driving motor through a chain structure or a gear device. Drive, adjust the direction by turning the top gear of the central driving wheel 12; Steering and moving, four passive universal wheels 13 cooperate with the central drive wheel to make the steering flexible.
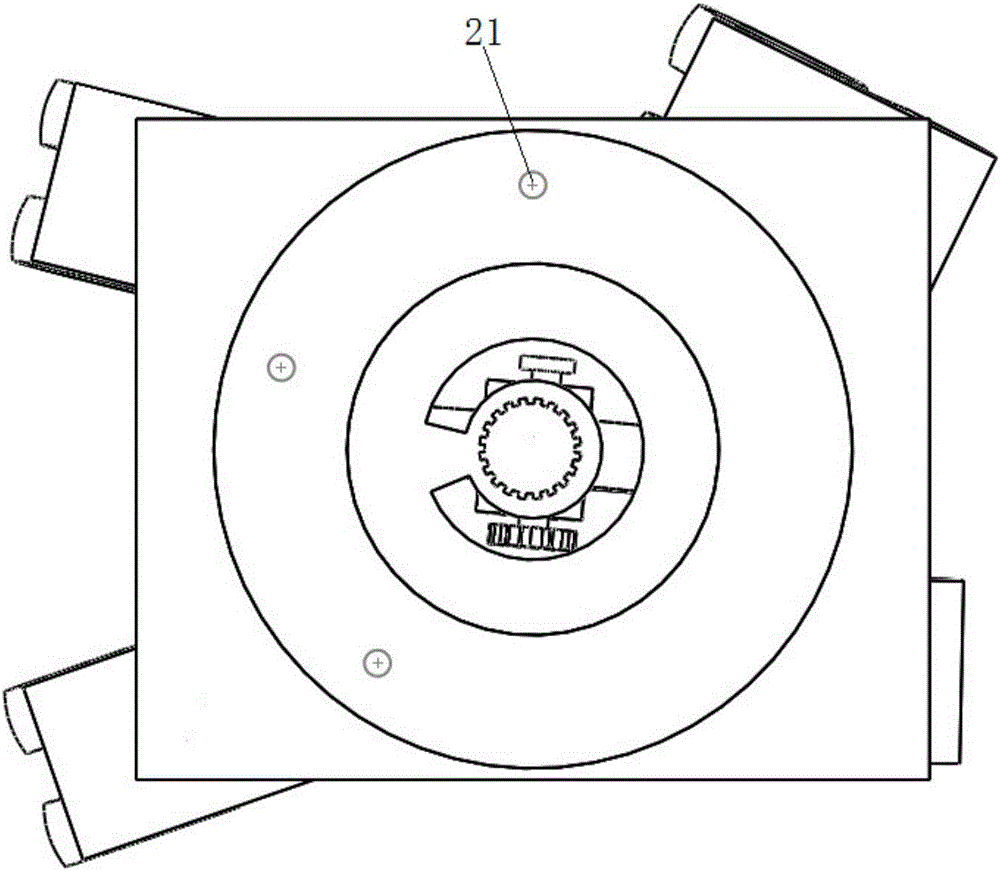
[0026] The permanent magnetic adsorption device 2 is installed on the chassis 11. It uses permanent magnet materials to adsorb the magnetically conductive wall surface in a non-contact manner. The magnet can be increased or decreased according to actual needs, and the utilization r...
Embodiment 2
[0032] The steering device of the above-mentioned wheeled magnetic adsorption wall-climbing robot is different from this embodiment in that the wheel hub of the central drive wheel is made of permanent magnet material, which increases the adsorption force between the robot and the wall and ensures that the central drive wheel and the wall are fully connected. Contact, control direction.
Embodiment 3
[0034] The difference between the steering device of the above-mentioned wheeled magnetic adsorption wall-climbing robot in this embodiment is that the wheel hub of the universal wheel is made of non-magnetic material, which makes it more flexible during the steering process.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More