

Detection method for target object grab position based on deep learning robot
A technology of deep learning and detection method, which is applied in the field of detection of the grasping position of the target, which can solve the problems of a lot of manual participation, time-consuming, and the target cannot accurately detect the grasping position.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0014] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
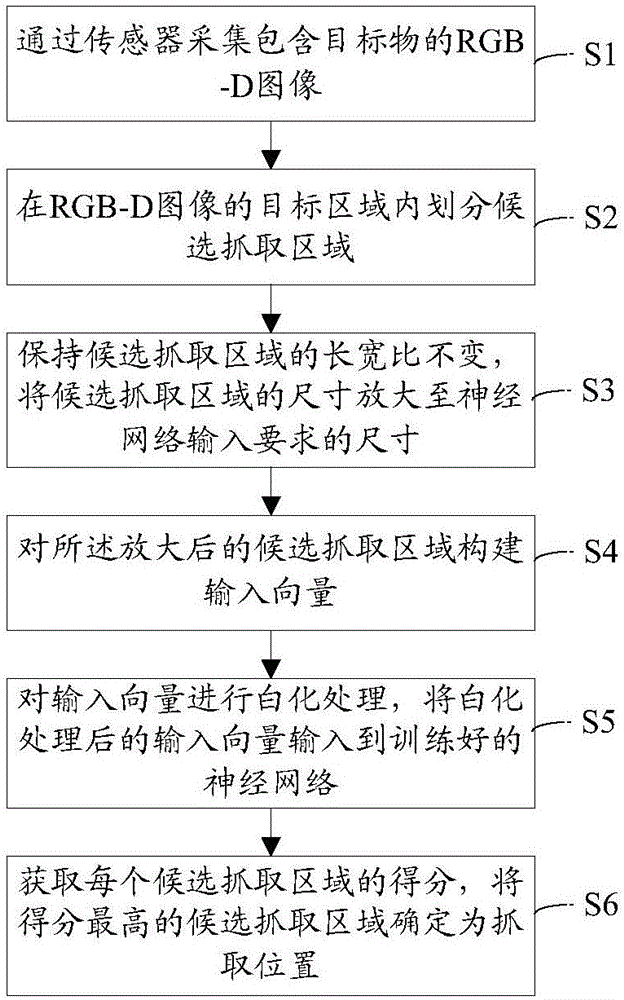
[0015] figure 1 It is a flow chart of a method for detecting a grasping position of an object based on a deep learning robot provided in an embodiment of the present invention. The method includes the following steps:
[0016] S1. Collect an RGB-D image containing a target object through a sensor;
[0017] The embodiment of the present invention uses the Microsoft Kinect sensor to obtain high-resolution RGB images and depth images of the captured objects. The RGB images include the surface color information and texture information of the objects to be captured, and the depth image includes the spa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More