

Heterogeneous depth camera-based three-dimensional information obtaining method and apparatus
A technology of depth camera and three-dimensional information, applied in the field of three-dimensional information acquisition method and device based on heterogeneous depth camera, can solve the problems of poor operability, difficult to guarantee the accuracy of similar control sets, low image resolution and the like
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0092] The preferred embodiments of the present invention will be described below in conjunction with the accompanying drawings. It should be understood that the preferred embodiments described here are only used to illustrate and explain the present invention, and are not intended to limit the present invention.
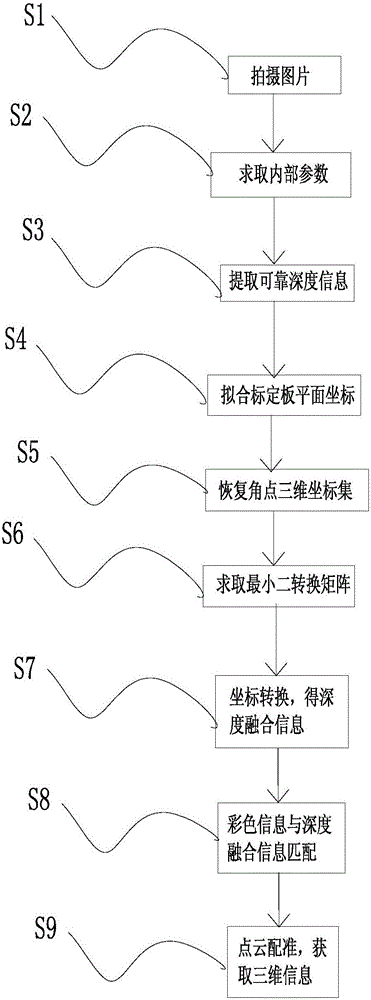
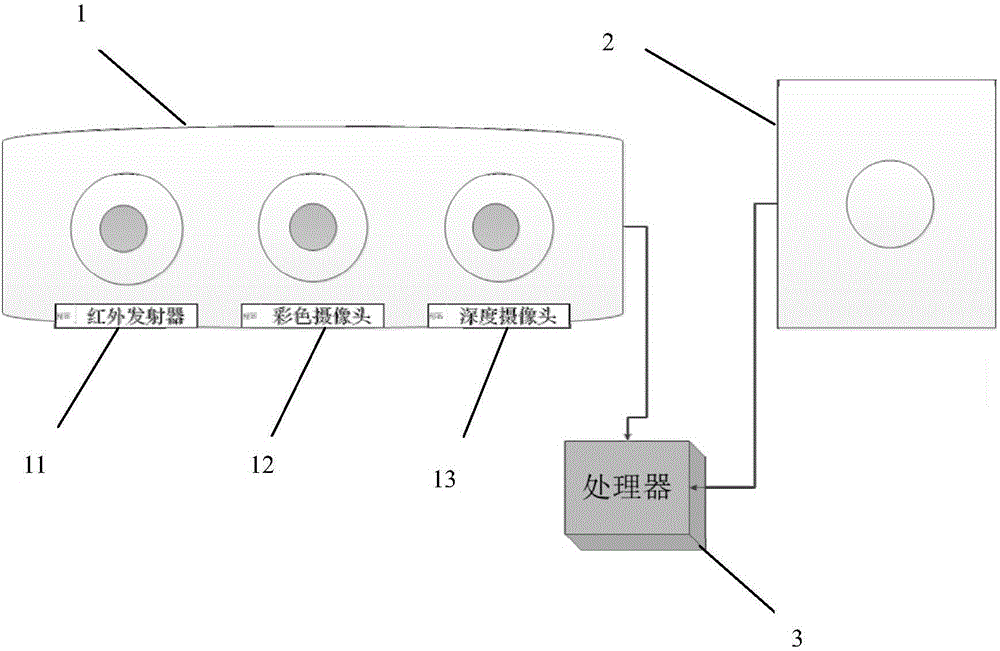
[0093] Such as Figure 1 ~ Figure 3 As shown, the three-dimensional information acquisition method based on the heterogeneous depth camera described in the present invention, under the condition that the resolution of the depth map of the Kinect camera is guaranteed to be constant, uses the accurate depth map obtained by the TOF camera to improve the reliability of the depth information of the Kinect camera , so as to obtain a high-resolution accurate depth map.
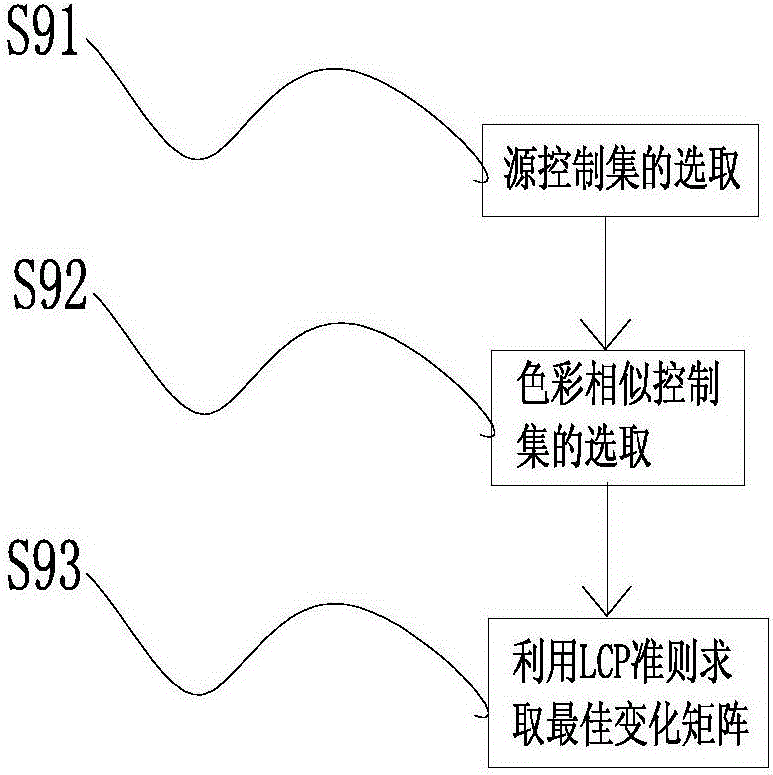
[0094] In the process of obtaining a high-resolution accurate depth map, in view of the problems of low registration speed caused by too many redundant control sets in the existing 3D point cloud global re...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More