

A visual slam method aided by sins/gps and odometry
An odometer and GPS signal technology, used in computing, 3D image processing, instruments, etc., can solve problems such as inability to adapt to the environment, large odometer errors, and easy failure of GPS signals.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0160] The present invention will be further described below in conjunction with the accompanying drawings.
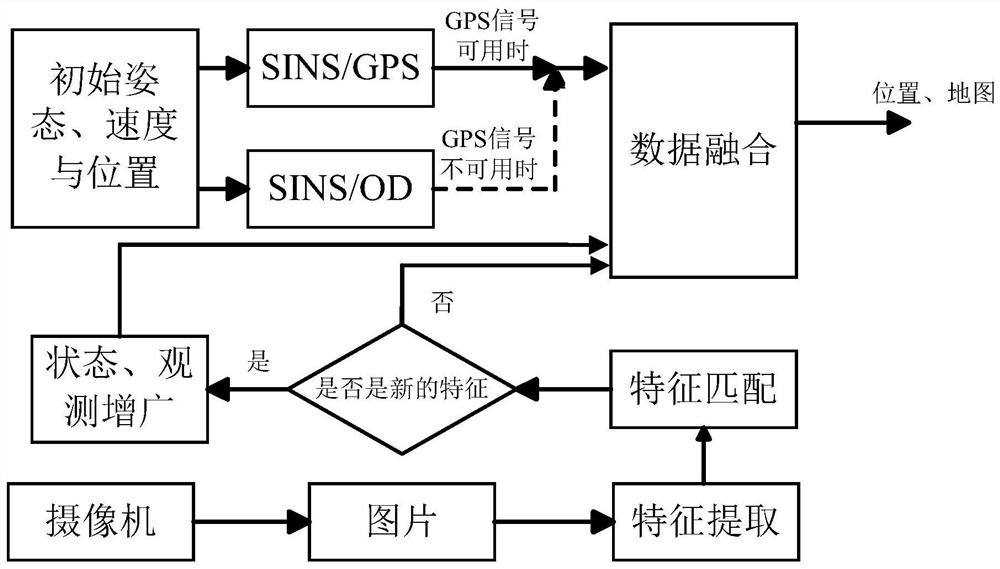
[0161] Such as figure 1 Shown is a system scheme diagram of the present invention. When the GPS signal is available, the SINS / GPS system provides a priori carrier attitude, velocity, and position information; when the GPS signal is not available, the SINS / OD system provides a priori carrier attitude, velocity, and position information. Among them, SINS is the strap-down inertial navigation system (Strap-down Inertial Navigation System), and OD is the odometer (Odometry). At the same time, the binocular camera takes pictures of the environment, and performs feature extraction and feature matching. Finally, the visual SLAM algorithm calculates the location information and completes the drawing.
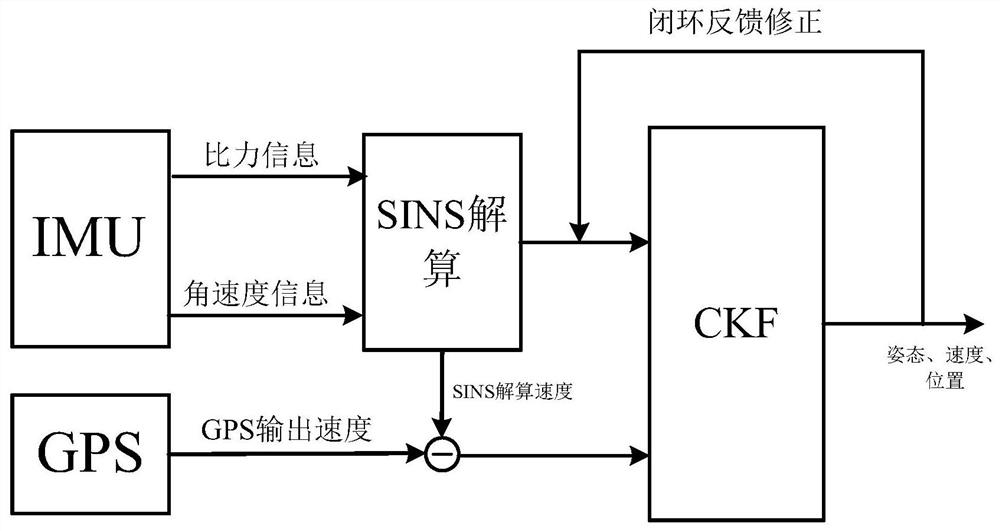
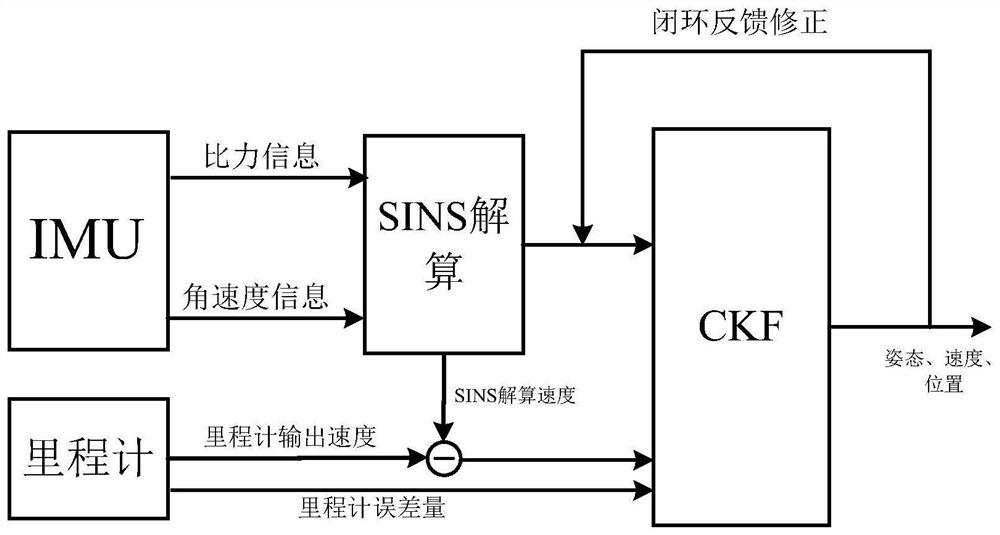
[0162] Such as figure 2 and 3 Shown is the scheme diagram of the SINS / GPS subsystem and the SINS / OD subsystem of the present invention. Both subsystems use the IMU to colle...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More