

An end effector for supporting endoscope in minimally invasive surgery in vitro
An end-execution, minimally invasive surgery technology, applied in the field of medical robots, can solve the problems of heavy end-effector, complex driving problems, complex kinematics, etc., to improve the flexibility and accuracy of motion, easy control and implementation, reduce The effect of motion inertia
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
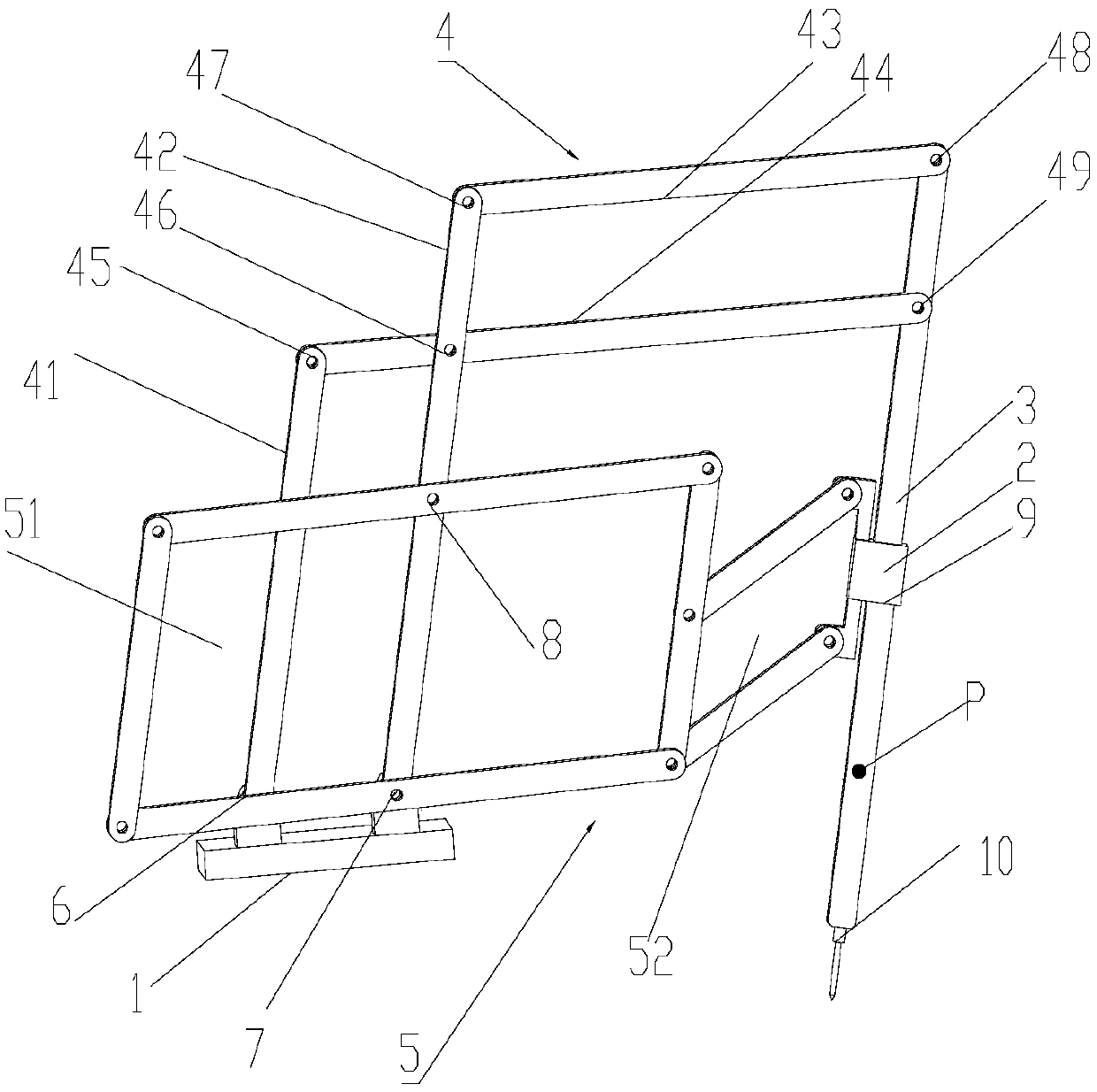
[0037] An end effector for supporting an endoscope in extracorporeal minimally invasive surgery, the structure of which is as follows: figure 1 As shown, it includes frame 1, slider 2, guide rail 3, first kinematic branch chain 4, second kinematic branch chain 5, first rotating pair 6, second rotating pair 7, third rotating pair 8, first moving pair 9 and the fourth rotating pair 10; the slider 2 is movably connected with the guide rail 3 through the first moving pair 9, and the first motion branch chain 4 is arranged on the frame 1 through the first rotating pair 6 and the second rotating pair 7; One end is movably connected with the guide rail 3, one end of the second kinematic branch chain 5 is connected with the frame 1 through the second rotating pair 7, and the other end is connected with the slider 2; through the active movement of the first kinematic branch chain, the second kinematic branch chain The active movement of the endoscope and the rotation movement of the en...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More