

Human gait acquisition and analysis system and method based on inertial sensor information fusion
An inertial sensor and sensor technology, applied in the fields of sensors, instruments, medical science, etc., can solve problems such as signal interference, difficulty in signal recognition and classification, error accumulation, etc., and achieve the effect of improving dynamic stability and realizing gait tracking and control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The present invention will be described in detail below in conjunction with the accompanying drawings.
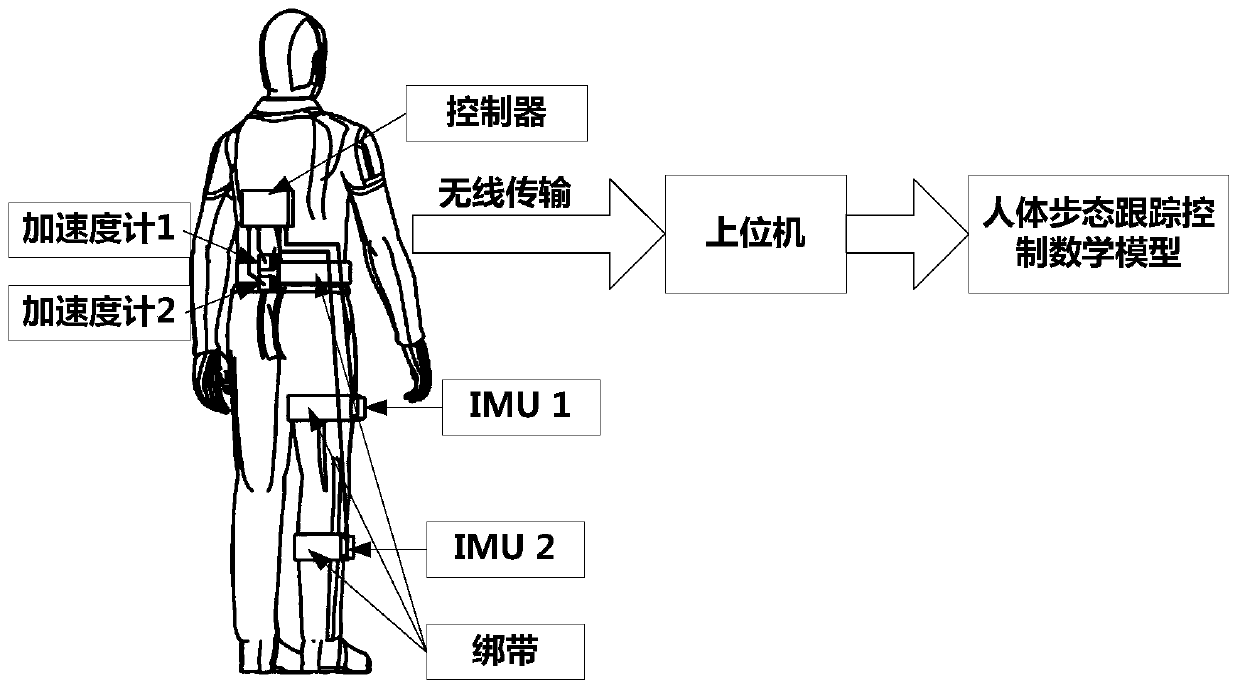
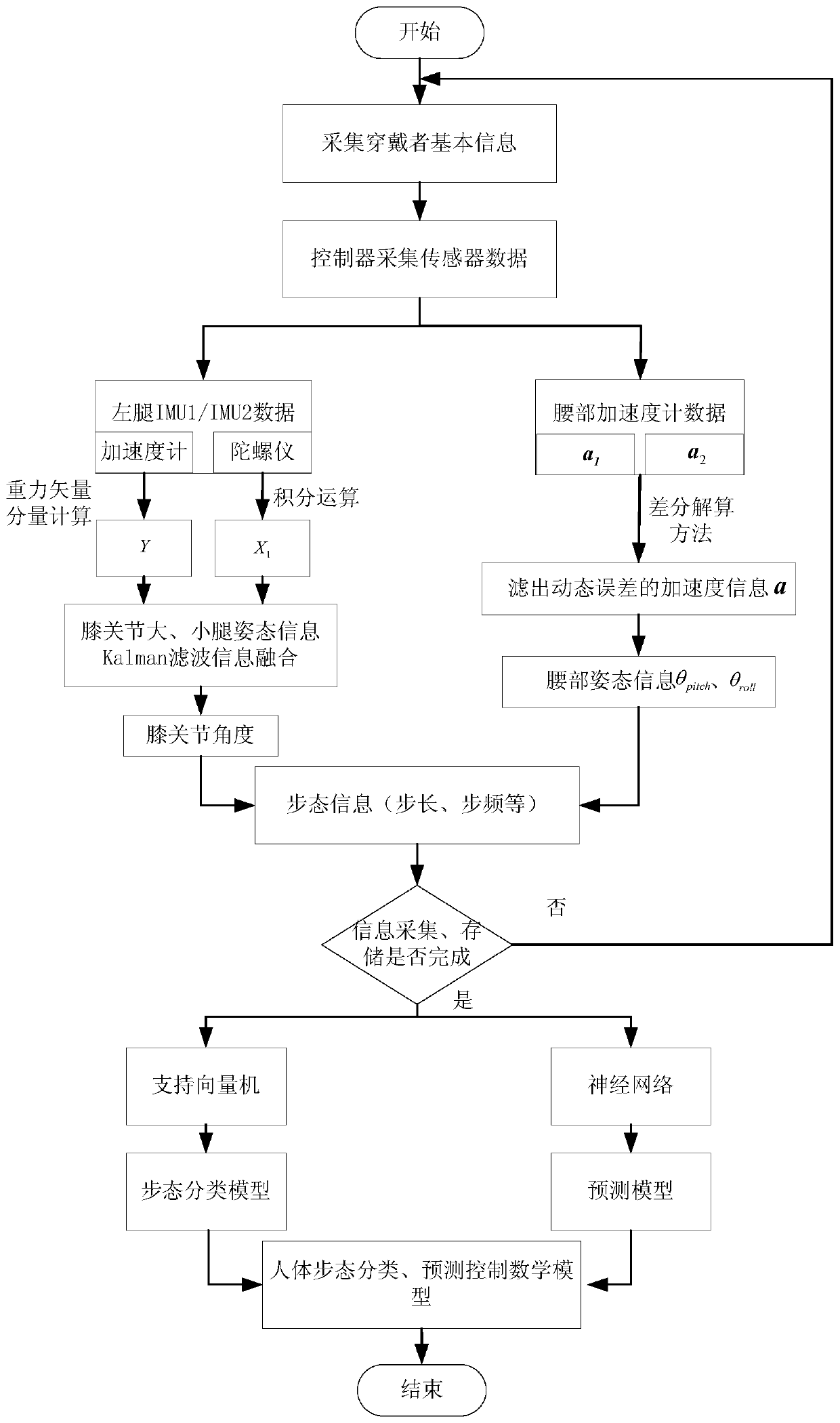
[0048] The system proposed in this paper is figure 1 As shown, it consists of 2 accelerometers, an inertial sensor network of 2 MEMS type IMU sensors, a strap, a controller, and a host computer, such as figure 1 shown. The system can realize the real-time non-contact measurement of human gait regularity, and process the information fusion of different output data of sensors. The details are as follows
[0049] (1) Sensor layout
[0050] Two identical IMU sensors are installed on at least one side of the human body's large and small legs, and are coaxially and coaxially placed on the outside of the thigh and the lower leg to transmit the acceleration and angular velocity information of the large and small leg segments that they are sensitive to. to the controller;
[0051] Two identical accelerometer sensors are coaxially and in the same direction placed on a bar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More