

Upper limb rehabilitation exoskeleton control method based on lower limb gaits
A control method and exoskeleton technology, which can be applied to program control manipulators, manufacturing tools, medical science, etc., can solve the problems of disregarding the coordination between upper and lower limbs, and poor rehabilitation effect, so as to improve the rehabilitation effect, promote the rehabilitation effect, and improve the rehabilitation effect. The effect of large-scale promotion and application
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention will be further described below in conjunction with the accompanying drawings.
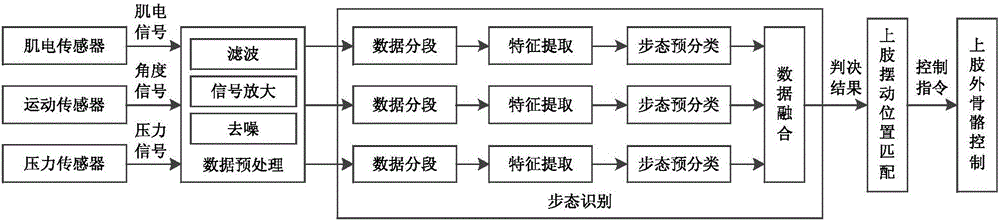
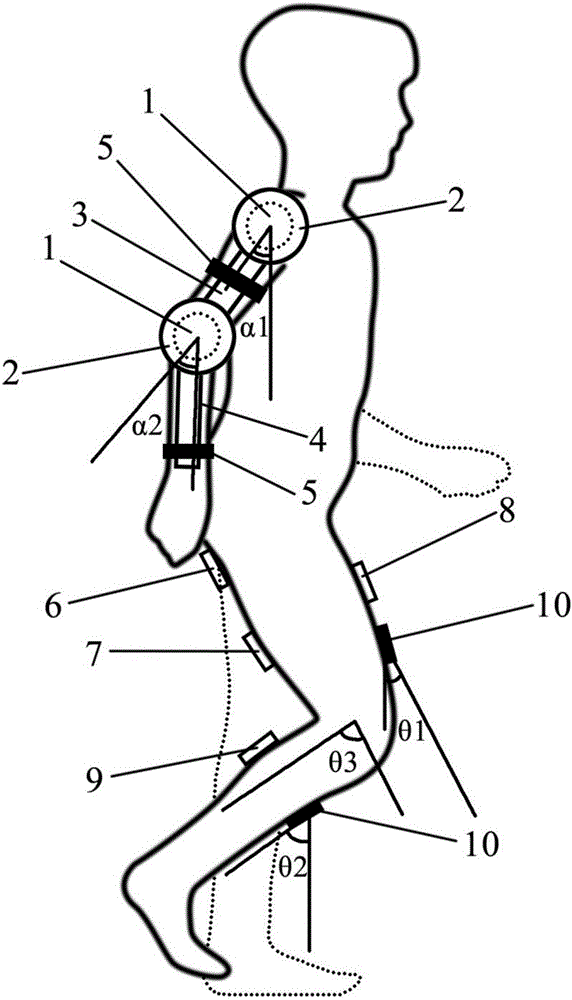
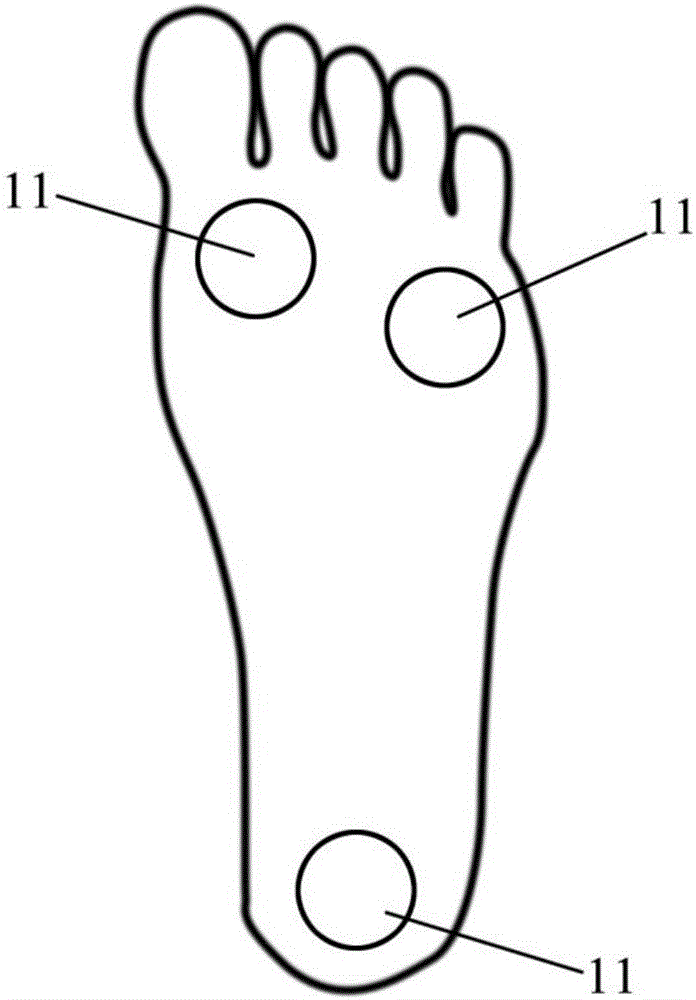
[0037] refer to Figure 1 ~ Figure 4 , an exoskeleton control method for upper limb rehabilitation based on lower limb gait, comprising the following steps: firstly, through the myoelectric sensor located in the lower limb, the motion sensor and the pressure sensor of the sole, the myoelectric signal, joint angle and plantar contact force are measured Acquisition, secondly use the BP neural network to pre-classify the gait of the sensor information after data preprocessing, and use the data fusion technology (D-S evidence theory) to get the final recognition result, and finally according to the upper limb swing position that matches the recognized gait Issue corresponding control commands to control the upper limb rehabilitation exoskeleton, and drive the upper limbs to carry out rehabilitation training.
[0038] The details of each step are as follows:
[0039]1) Da...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More