

A handling robot
A technology of manipulator and clamping mechanism, applied in the field of manipulator, can solve the problem of low efficiency in transferring materials
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The present invention will be further described below in conjunction with specific examples.
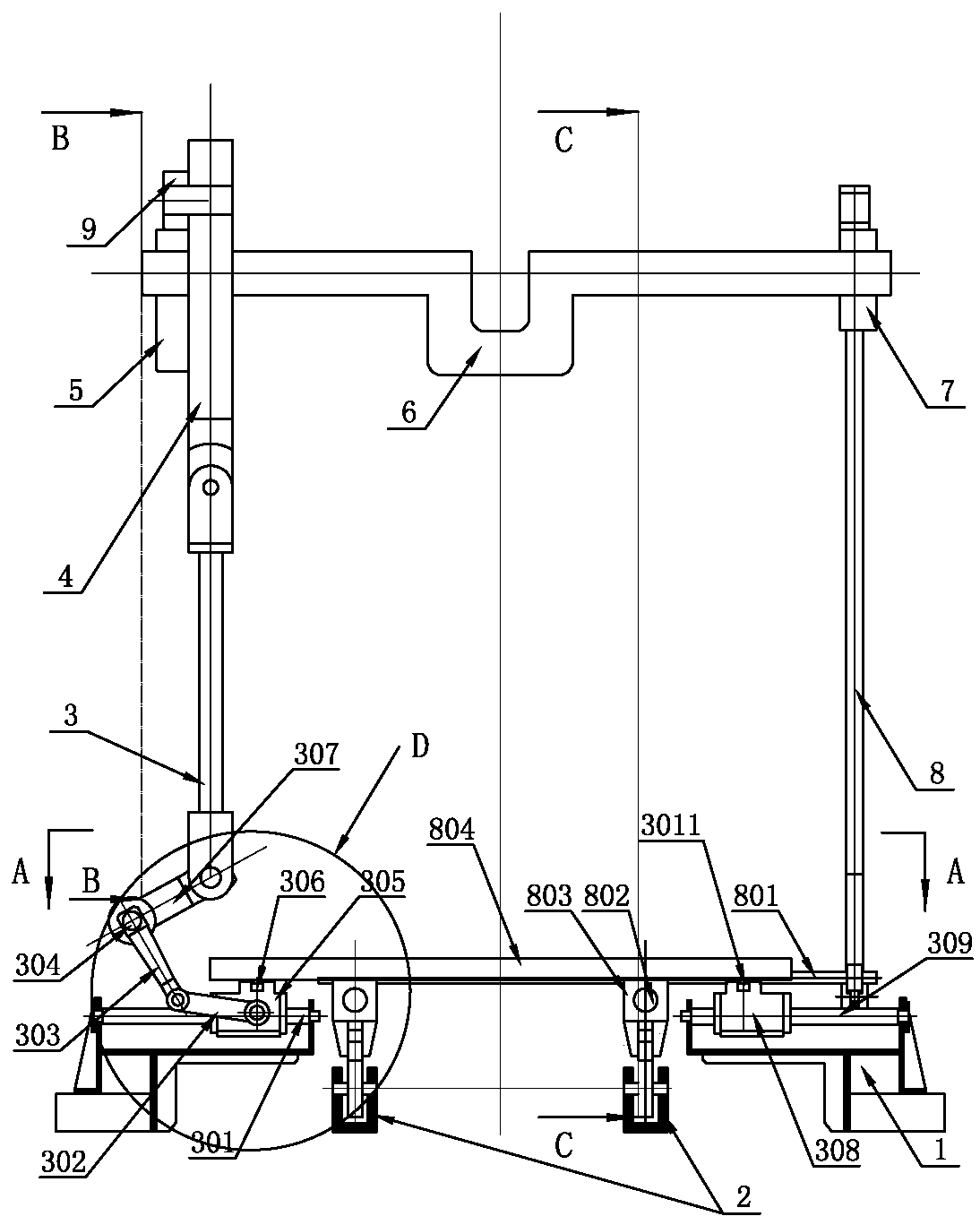
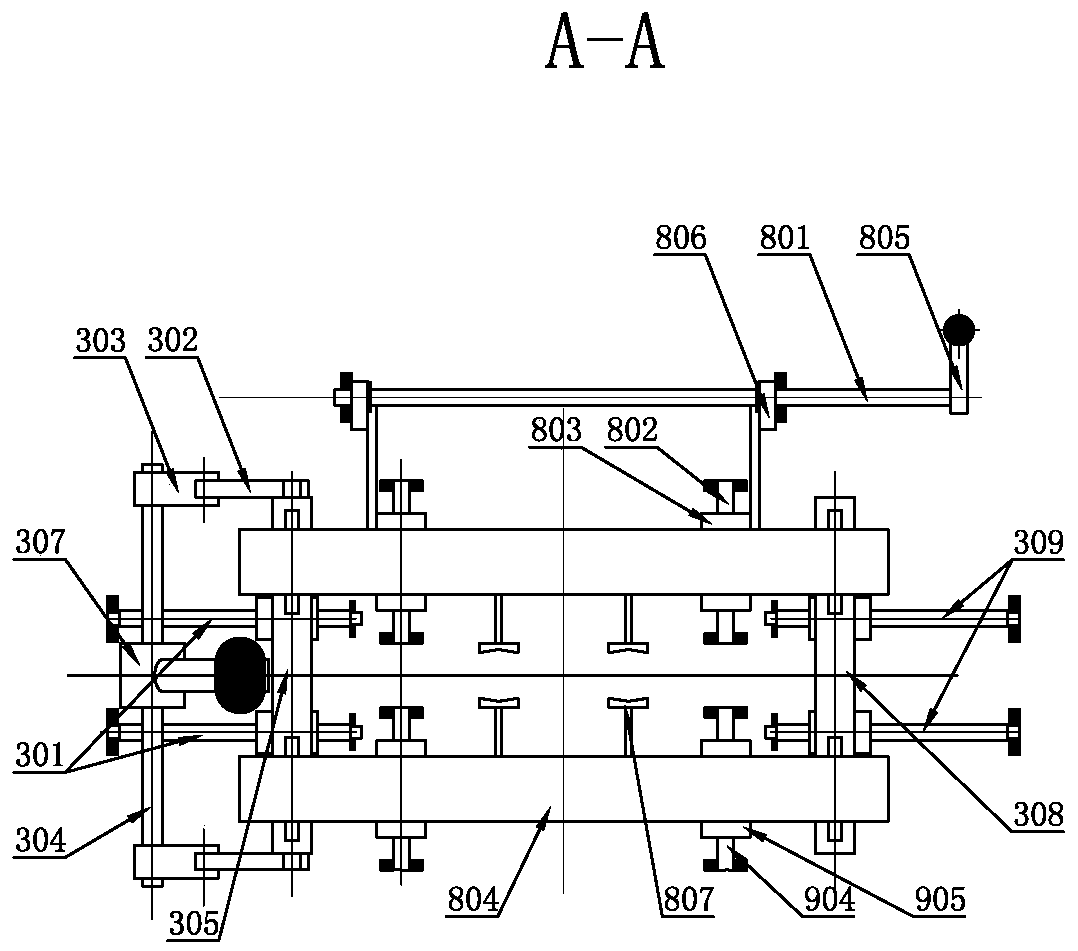
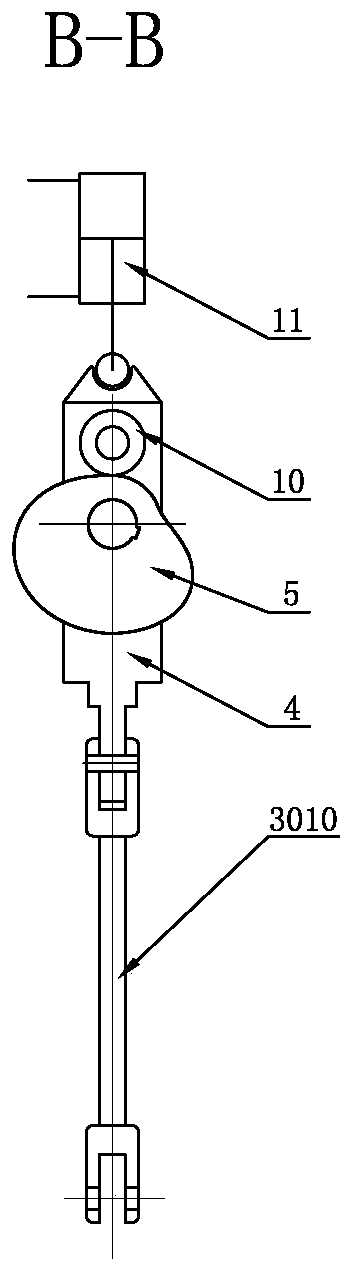
[0021] Such as Figure 1~5 A handling manipulator shown includes a crankshaft 6 rotatably connected to the press frame, a clamping lever 13 and a cam slider 4, and the two ends of the crankshaft 6 are fixedly connected with a clamping cam 7 and a pushing cam 5 respectively. , one end of the clamping lever 13 is connected with a clamping roller 14, the clamping roller 14 is in contact with the upper side of the outer edge of the clamping cam 7, and the other end of the clamping lever 13 is connected with an active clamping mechanism 8, and the active clamping mechanism 8 A driven clamping mechanism 9 is also connected to the top, and the active clamping mechanism 8 and the driven clamping mechanism 9 are arranged oppositely. The upper part of the cam slider 4 is rotatably connected with a push roller 10, and the push roller 10 interferes with the outer edge of the push cam 5. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More