

An automatic grabbing device for injection molded blades
A grasping device and automatic technology, applied in the direction of transportation and packaging, conveyor objects, etc., can solve the problems of high labor intensity, multi-labor, low production efficiency, etc., to reduce labor intensity, ensure labor safety, and provide production efficiency. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
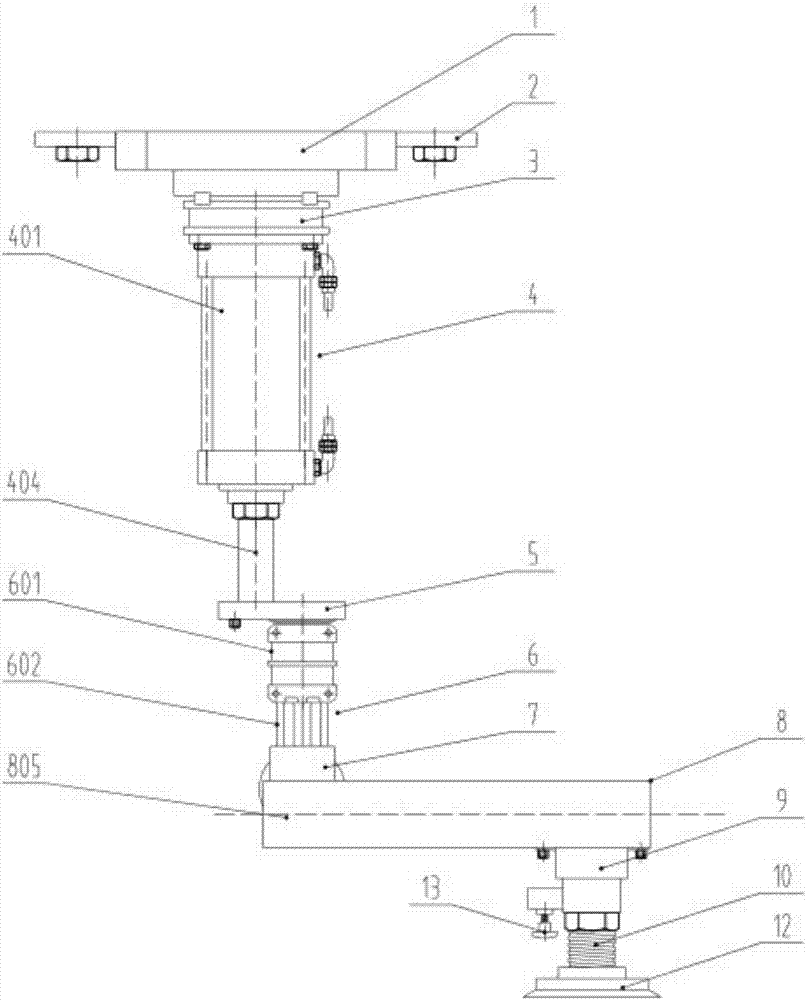
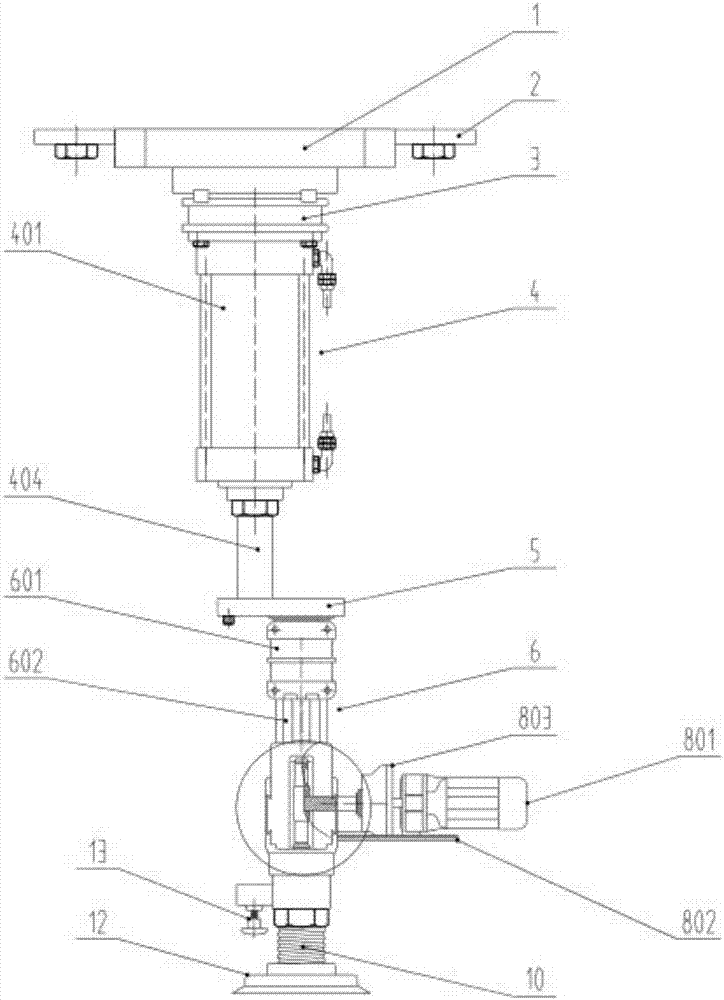
[0023] An automatic grabbing device for injection molded blades, including a mounting base 1, a fixed plate 2, a buffer 3, a vertical drive mechanism 4, a connecting plate 5, a rotating mechanism 6, a connecting block I7, a horizontal driving mechanism 8, a connecting block II9, and an external screw 10. Solenoid valve 11, suction cup 12 and fastening bolt 13, characterized in that: the mounting base 1 is fixedly connected with the fixed plate 2, the fixed plate 2 is installed on the main engine or the casing, and the mounting base 1 is perpendicular to the The driving mechanism 4 is fixedly connected through the buffer 3, and a connecting plate 5 is installed below the vertical driving mechanism 4, and the connecting plate 5 is fixedly connected with the rotating mechanism 6, and the rotating mechanism 6 moves with the horizontal driving mechanism 8 through the connecting block I7 connection, the horizontal drive mechanism 8 is fixedly connected with the outer screw rod 13 thr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More