

Binocular-vision-based oil tea fruit picking system and control method
A technology of binocular vision and camellia oleifera, which is applied in the direction of picking machines, agricultural machinery and implements, etc., can solve the problems of low efficiency and heavy labor, and achieve the effect of improving efficiency and saving manpower
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The principles and features of the present invention are described below in conjunction with the accompanying drawings, and the examples given are only used to explain the present invention, and are not intended to limit the scope of the present invention.
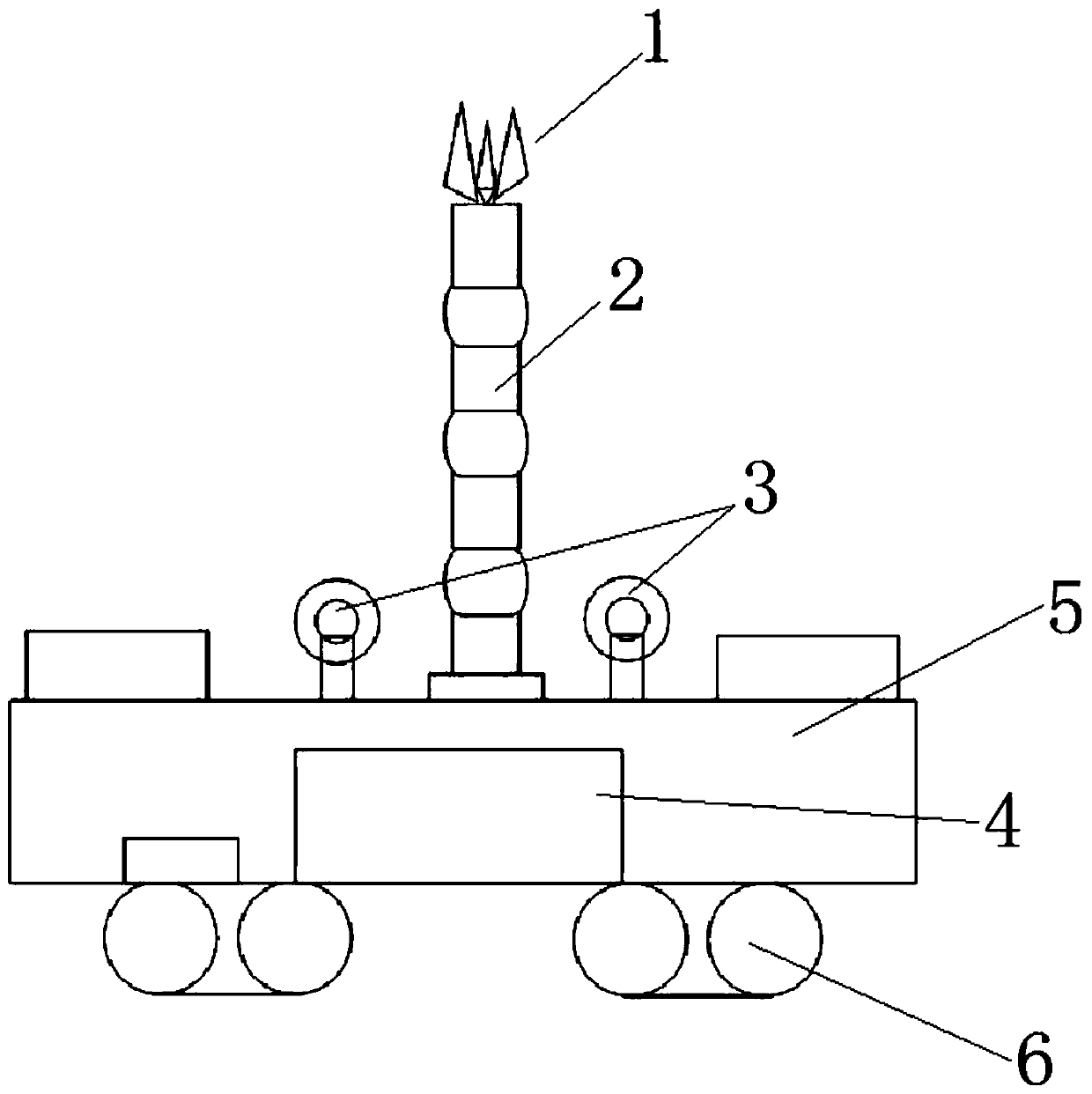
[0022] figure 1 It is a schematic structural diagram of a camellia oleifera fruit picking system provided by an embodiment of the present invention.
[0023] Such as figure 1 As shown, a camellia oleifera fruit picking system based on binocular vision includes a working platform 5 , a crawler-type mobile device 6 , a picking actuator 1 , a mechanical arm 2 , a binocular vision device 3 and a control device 4 .
[0024] The working platform 5 is a hollow cavity structure, the crawler-type moving device 6 is arranged at the bottom of the working platform 5, the mechanical arm 2 is arranged at the center of the upper surface of the working platform 5, and the picking execution The mechanism 1 is arranged on the top o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More