

A start control method for an unmanned tracked vehicle
A technology of unmanned driving and control methods, which is applied in the direction of control devices, vehicle components, external condition input parameters, etc., can solve problems that do not involve the start control of tracked vehicles, achieve the effect of reducing sliding grinding work and improving working life
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] Preferred embodiments of the present invention will be specifically described below in conjunction with the accompanying drawings, wherein the accompanying drawings constitute a part of the application and are used together with the embodiments of the present invention to explain the principles of the present invention.
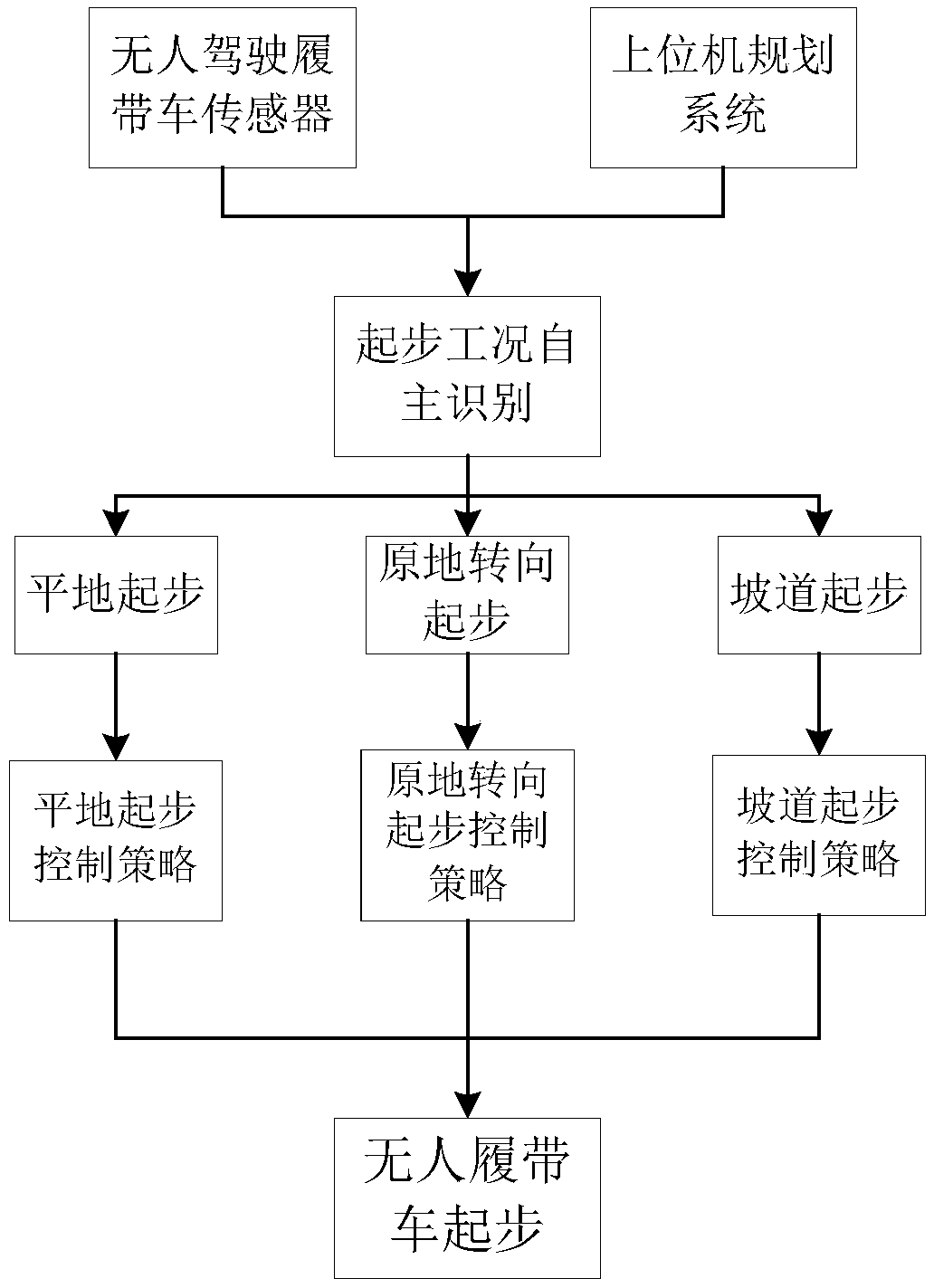
[0056] A specific embodiment of the present invention discloses a starting control method of an unmanned tracked vehicle, such as figure 1 , including the following steps:
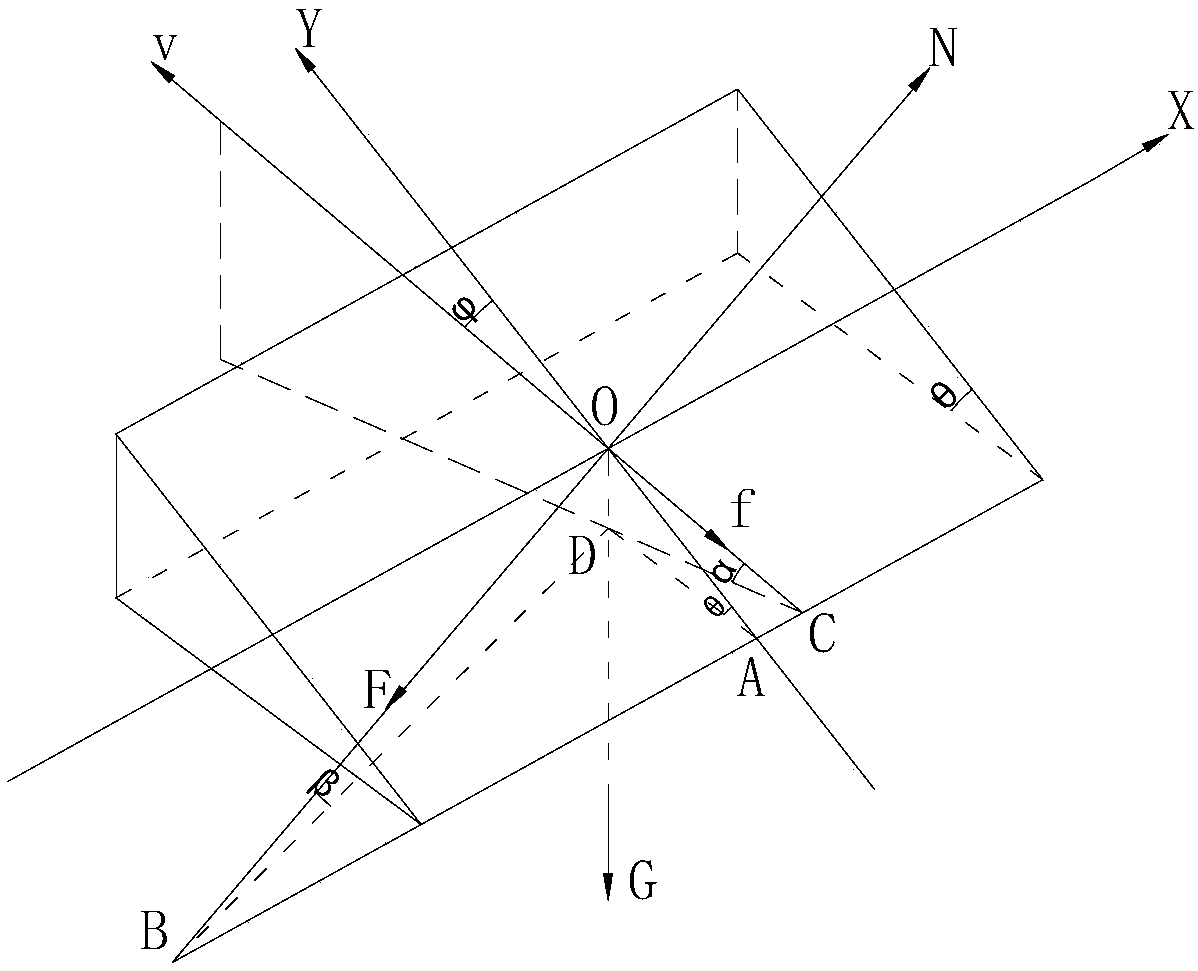
[0057] Step S1. Collect the driving parameters of the unmanned tracked vehicle, and calculate the slope of the slope and the real-time heading of the vehicle on the slope; obtain the planning parameters of the host computer planning system.
[0058]The driving parameters of the above-mentioned unmanned tracked vehicle include vehicle body attitude angle, vehicle speed, vehicle heading, etc., and the vehicle body attitude angle further includes heading angle, pitch angle and roll an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More