

Base joint mechanism of humanoid dextrous hand
A joint-based and hand-based technology, applied in the field of robotics, can solve the problems of small palm size space, increased weight, and the inability of long-distance transmission of gear trains to achieve the effect of saving hand space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
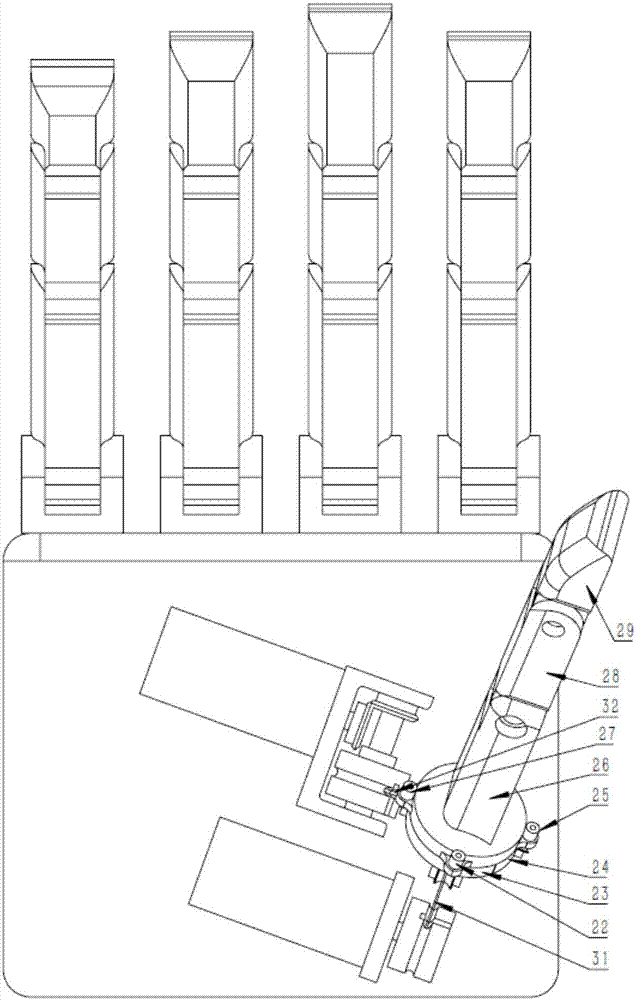
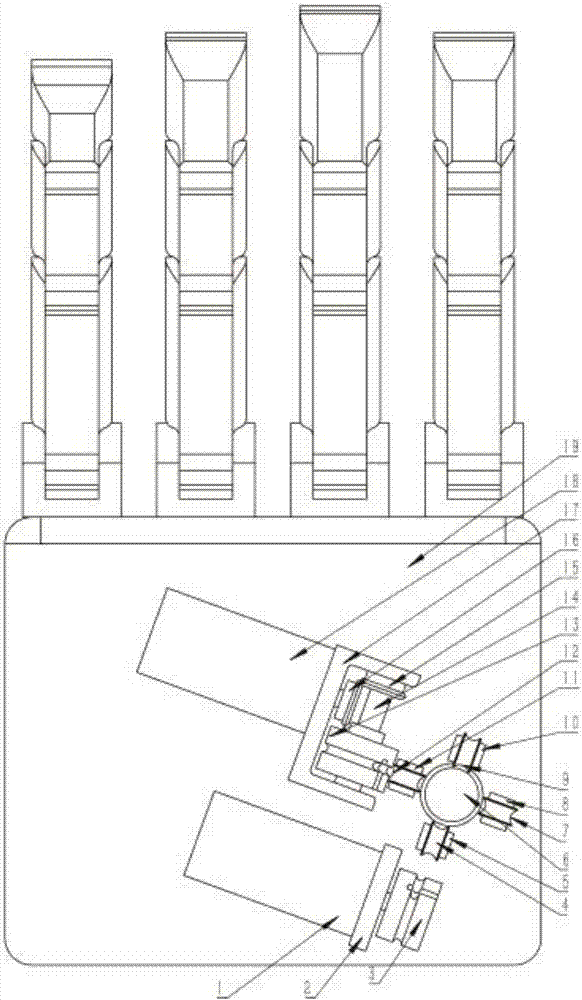
[0032] Such as figure 1 As shown, the basic structure of the humanoid dexterous hand base joint mechanism according to the present invention mainly consists of base joints, support rods, two fasteners, four aluminum sleeves, four pulleys and supports, four sections of rope, two rope pulleys and two motor drive systems.
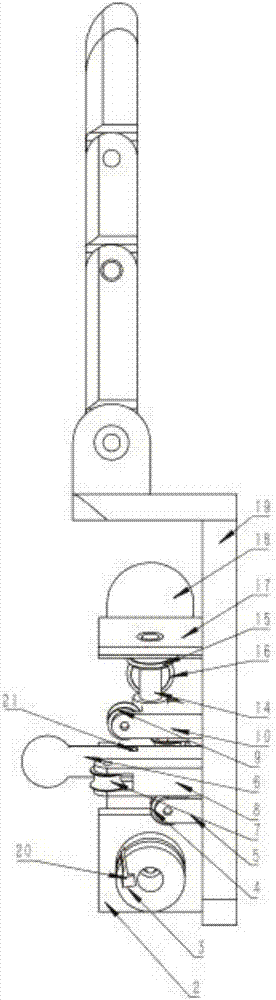
[0033] Such as Figure 2-4 As shown, the base joint is in contact with the small ball on the support rod through the middle ball socket, and the first fastener and the second fastener connect the support rod and the base joint through screws to form a ball joint connection; there is a first aluminum sleeve on the base joint , the second aluminum sleeve, the third aluminum sleeve and the fourth aluminum sleeve, wherein the first aluminum sleeve is opposite to the second aluminum sleeve, the third aluminum sleeve is opposite to the fourth aluminum sleeve, and these aluminum sleeves are placed between the fixed points of the base joint On the top, the end of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More