

Limit dynamic track tracking control system for unmanned vehicle
A control system and trajectory tracking technology, applied in the direction of control devices, etc., can solve the problems of not achieving high speed of unmanned vehicles and limiting the dynamic performance of unmanned vehicles.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] The present invention will be described in detail below with reference to the accompanying drawings and examples.
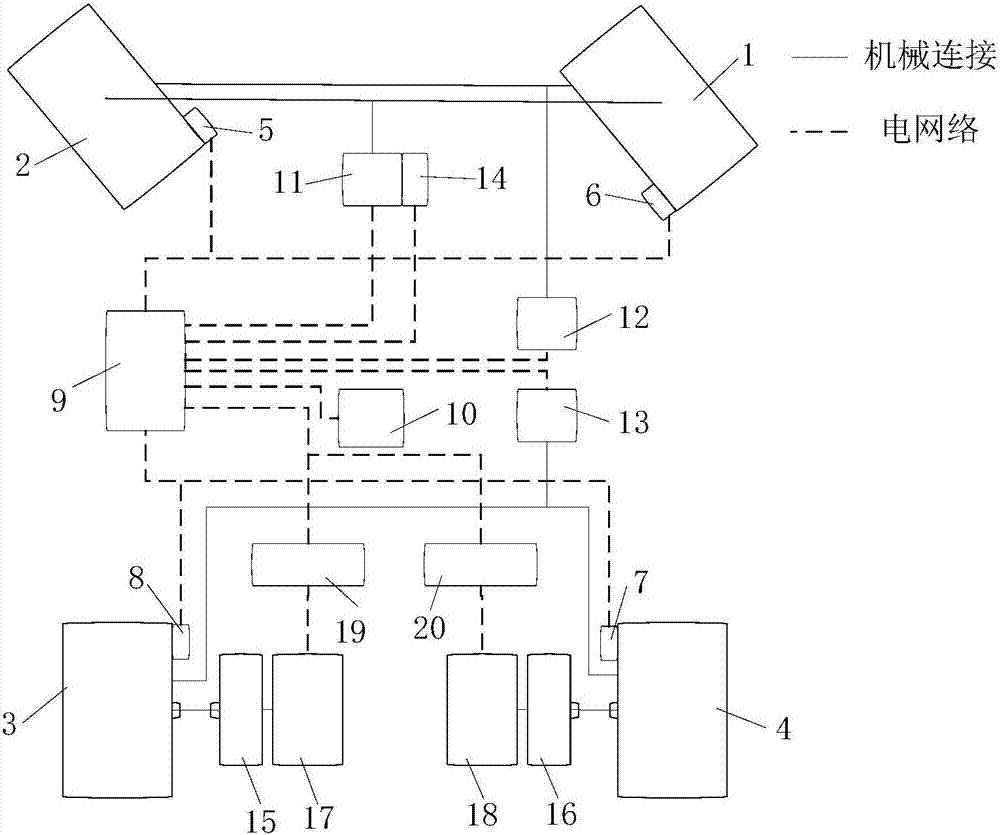
[0057] The present invention provides an unmanned vehicle limit dynamics trajectory tracking control system, the trajectory tracking control system includes: a sensor module and a vehicle controller 9, the peripheral equipment is a steering steering gear 11, a braking steering gear 12, 13, a motor Controllers 19,20, drive motors 16,17, speed reducers 15,16 and wheels 1,2,3,4.
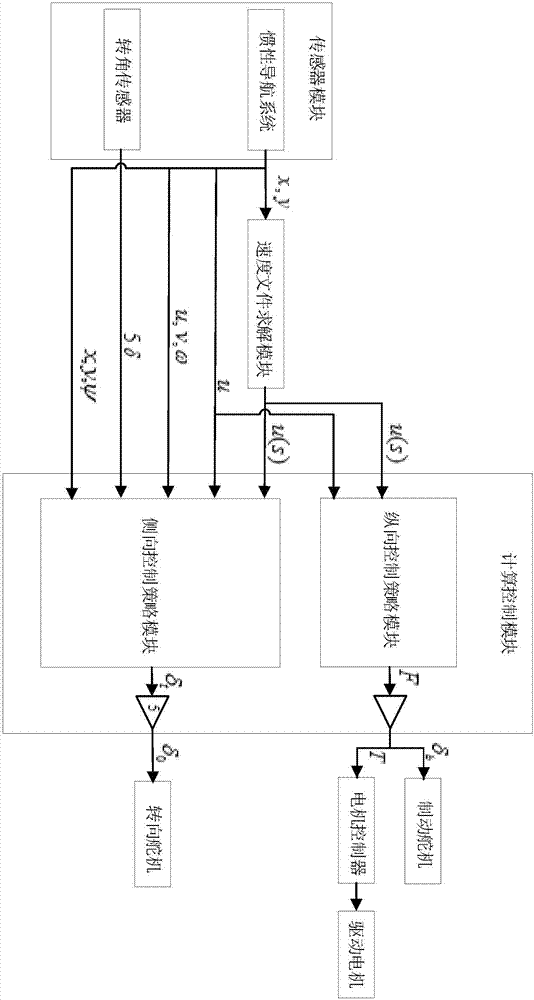
[0058] In the embodiment, the sensor module is the inertial navigation system 10, the shock-absorbing displacement sensors 5, 6, 7, 8 and the rotation angle sensor 14, and the vehicle controller 9 includes a speed file solution module and a calculation control module.
[0059] like figure 1 As shown, the inertial navigation system 10 is installed at the center of mass of the vehicle, and is used to obtain information such as the real-time position, attitude, longitudinal speed, lat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More