

Optimal constant guidance command solving method for automatic collision avoidance of unmanned plane
A technology for guidance commands and unmanned aerial vehicles, which is applied to navigation calculation tools and other directions, can solve the problems of large peak value of nonlinear guidance commands, poor attitude tracking performance, and difficulty in accurately estimating collision avoidance time, and achieves good results and reasonable design. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0106] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
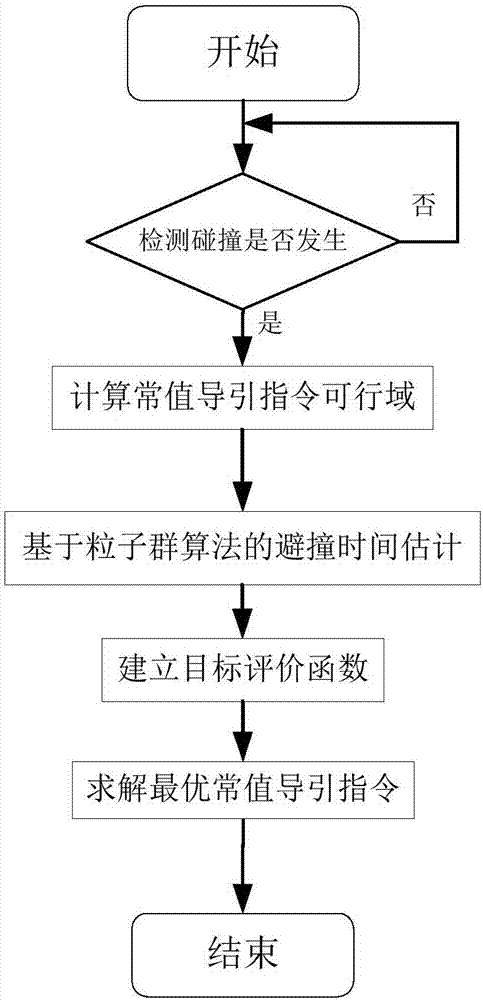
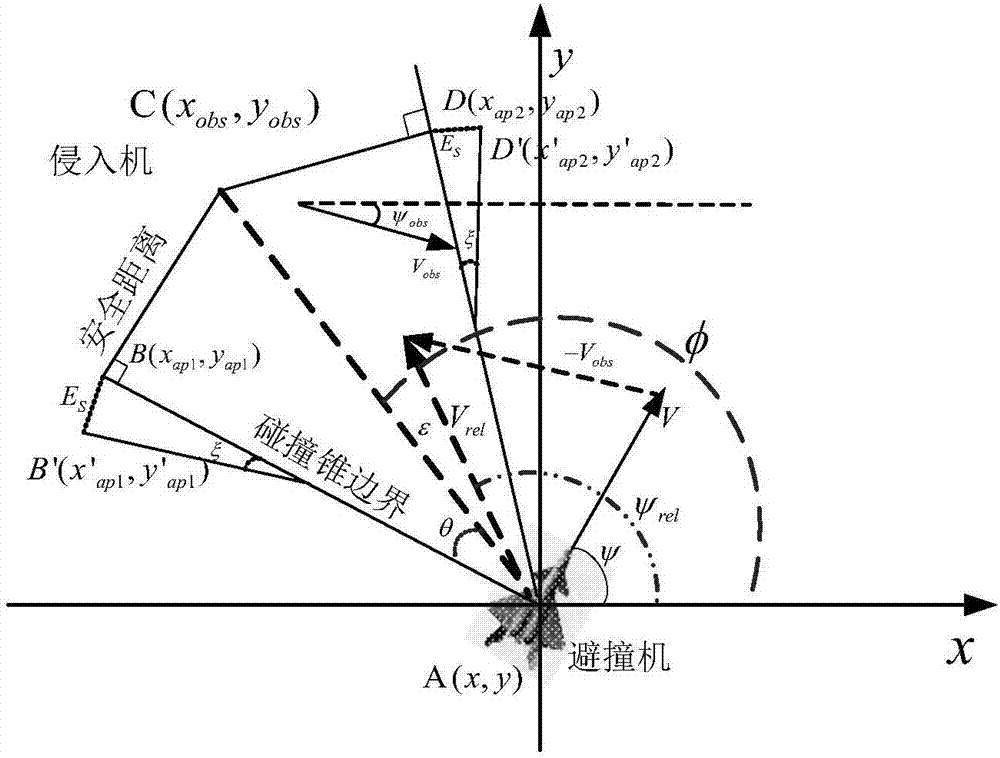
[0107] The present invention proposes a method for solving the optimal constant guidance command for automatic collision avoidance of UAVs, and detects whether two UAVs will collide according to the relative geometric relationship between the intruder and the collision avoidance aircraft. If there is no collision, the drone continues to fly normally to the target point. If it is detected that two UAVs will collide, calculate the feasible region of the guidance command, estimate the completion time of collision avoidance according to the particle swarm algorithm, establish the target evaluation function, and solve the guidance command corresponding to the minimum value of the target evaluation function through the traversal method. Excellent constant value guide instruction.
[0108] A method for solving the optimal constant value guidance comma...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More