

Flexible cystoscopy surgery auxiliary robot system
A robot system and robot technology, applied in the field of medical devices, can solve the problems of low precision, the inability of the soft lens holder to fit the soft lens, and the inability to adapt to the soft lens, etc., to achieve the effect of improving the versatility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment 1
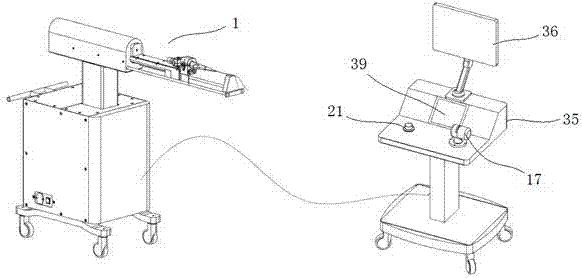
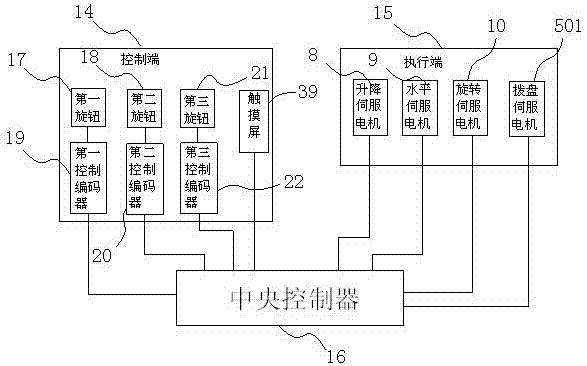
[0054]As shown in the figure, the robot system for assisting soft mirror surgery in this embodiment includes a robot 1 for moving the soft mirror with multiple degrees of freedom; a control terminal 14 for converting operation actions into control signals; directly and / or through the transmission mechanism to drive the execution end 15 of the robot 1; it is used to collect and process the control signal of the control end 14, and transmit the control signal to the central controller 16 of the execution end 15.
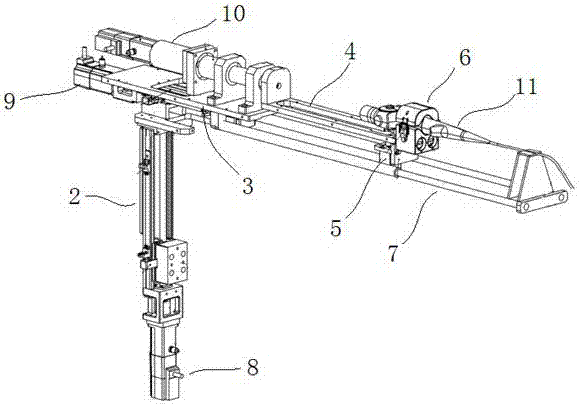
[0055] The robot 1 is composed of a lifting manipulator 2, a horizontal telescopic manipulator 3, a rotating manipulator 4, a flexible mirror bending control mechanism 5, a soft mirror holder 6 and a movable support frame 7; the horizontal telescopic manipulator 3 is installed on the lifting manipulator 2, so that the horizontal telescopic mechanical arm 3 can go up and down with the lifting mechanical arm 2; the lifting mechanical arm 2 is combined with the screw rotat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More