

A large-scale scene 3D modeling method and device based on a depth camera
A technology of depth camera and modeling method, applied in the field of 3D modeling, can solve the problems of huge amount of data, high difficulty, poor flexibility, etc., and achieve the effect of low storage space, wide application field and flexible use.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be described in detail below with reference to the accompanying drawings and in combination with embodiments.
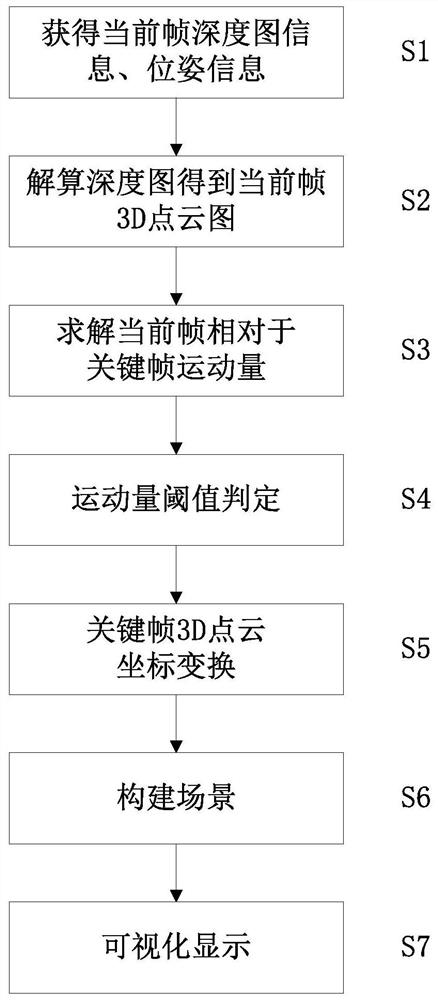
[0036] refer to Figure 1-4 As shown, a large-scale scene 3D modeling method based on depth camera, such as figure 1 shown, including the following steps:
[0037] S1. Obtain the depth map information and pose information of the current frame, and use the depth camera to obtain the depth map information of the current frame at the current position. The pose information includes position information and attitude information. In an outdoor environment, differential GPS and IMU (Inertial Measurement Unit, inertial Measurement unit) sensor combination acquisition, and for the indoor environment, the pose information calculated from the depth image is fused with the IMU sensor information.
[0038] S2. Calculate the depth map to obtain the current frame 3D point cloud map, and use coordinate transformation to uniformly convert the depth...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More