

Reliability fuzzy prediction method based on hierarchical division of welding robot system
A welding robot and reliability technology, applied in welding equipment, auxiliary welding equipment, welding/cutting auxiliary equipment, etc., can solve the problem that the reliability level of the welding robot system cannot be accurately predicted, the reliability level is difficult to predict, and the impact is large. question
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0165] The present invention will be further described below in conjunction with drawings and embodiments.
[0166] combine Figure 1 to Figure 4 , the specific implementation steps of the reliability fuzzy prediction method based on the hierarchical division of the welding robot system are as follows:
[0167] Step 1. According to the system composition and function of PR1400 welding robot, it is divided into layers.
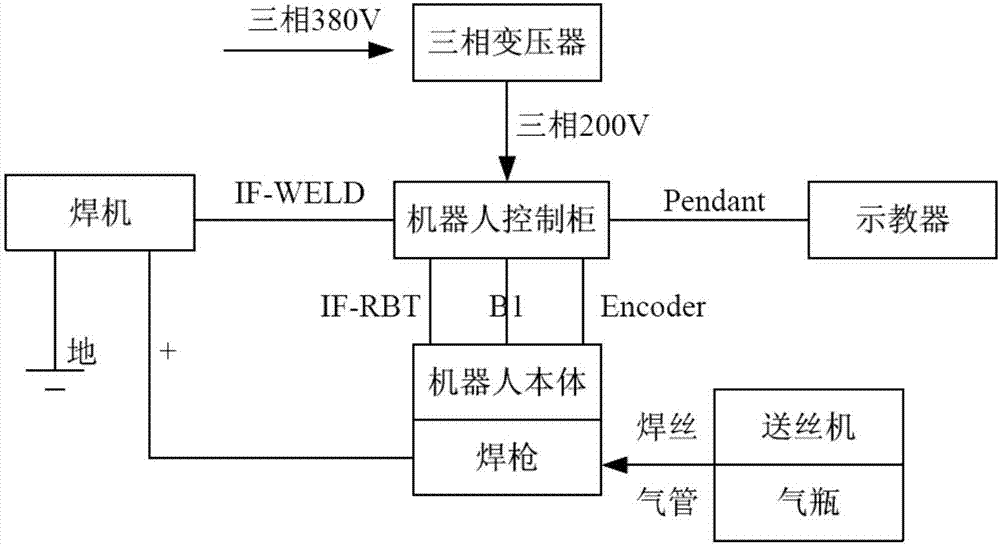
[0168] 1.2 Learn more about the structure and components of the PR1400 welding robot system. The PR1400 welding robot system is simplified as follows figure 1 Shown:
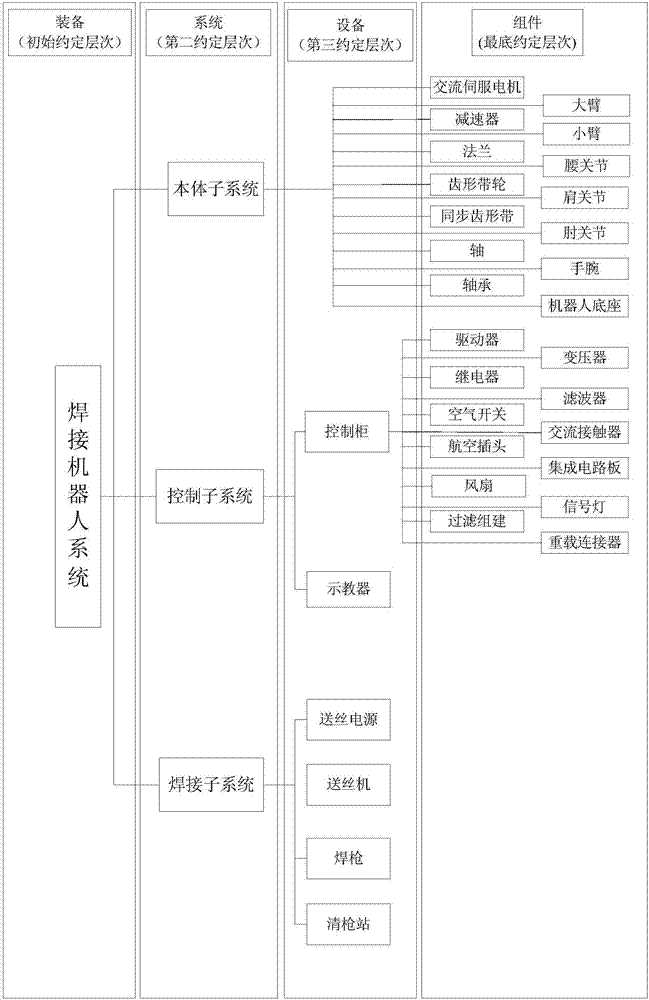
[0169] 1.3 According to the structure and functions of PR1400 welding robot, the welding robot system is abstracted into three subsystems: control subsystem, welding subsystem and body subsystem. The hierarchical division results of the welding robot system are as follows: figure 2 As shown, the components of each subsystem are as follows:
[0170] (1) Ontology subsystem of the robot
[0...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More