

Full-automatic ophthalmic operation robot
A technology of ophthalmic surgery and robotics, applied in ophthalmic surgery, surgical robots, etc., can solve problems such as damage to eyeball tissue, unstable manual operation, etc., and achieve the effect of improving accuracy and good surgical effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention is further described below in conjunction with embodiment and accompanying drawing.
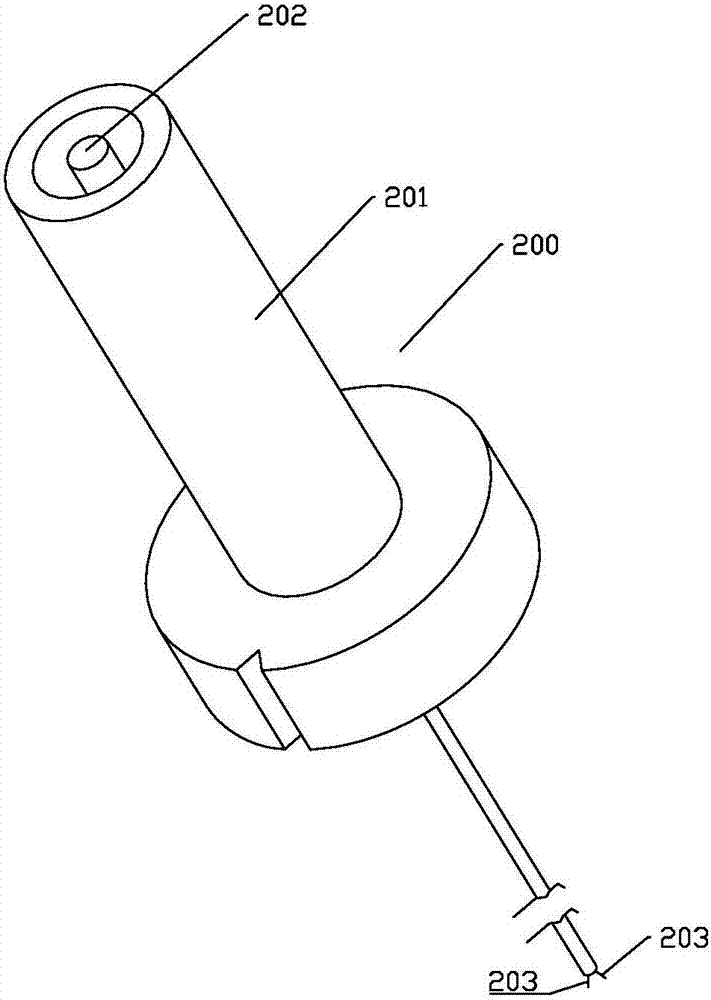
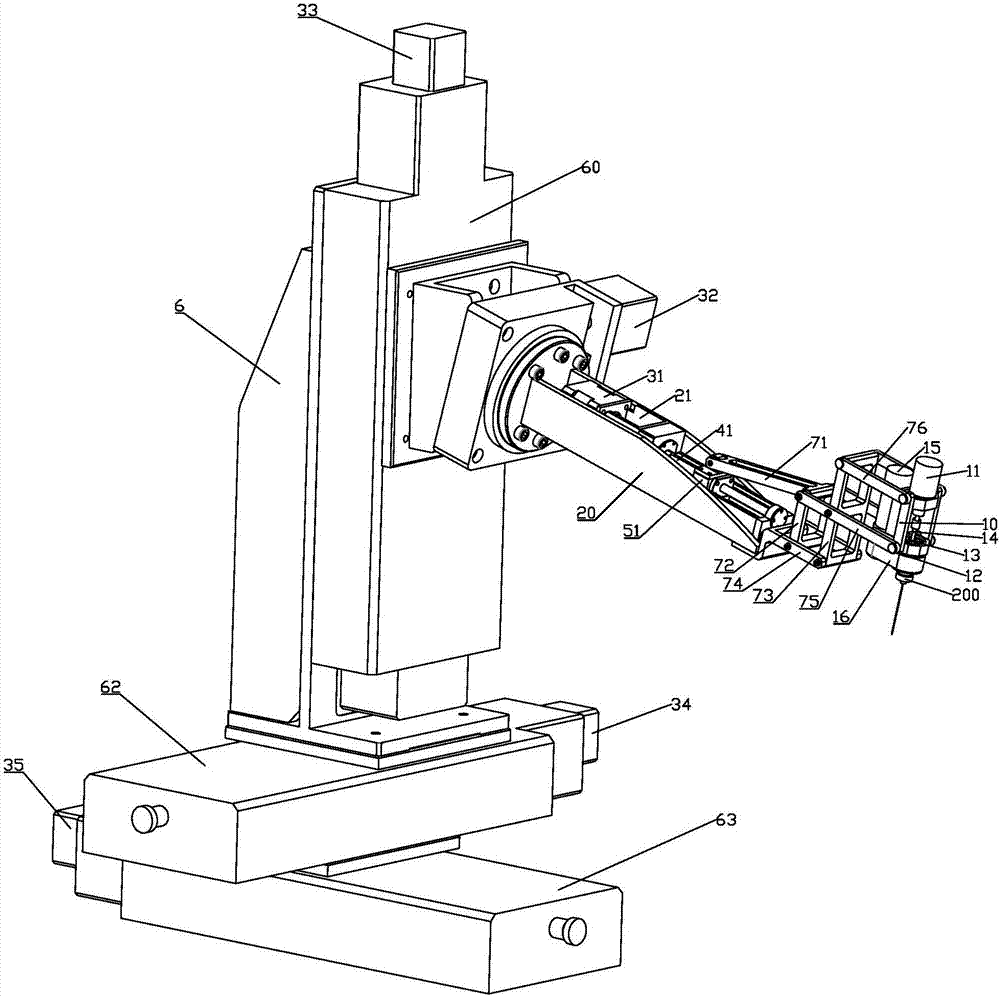
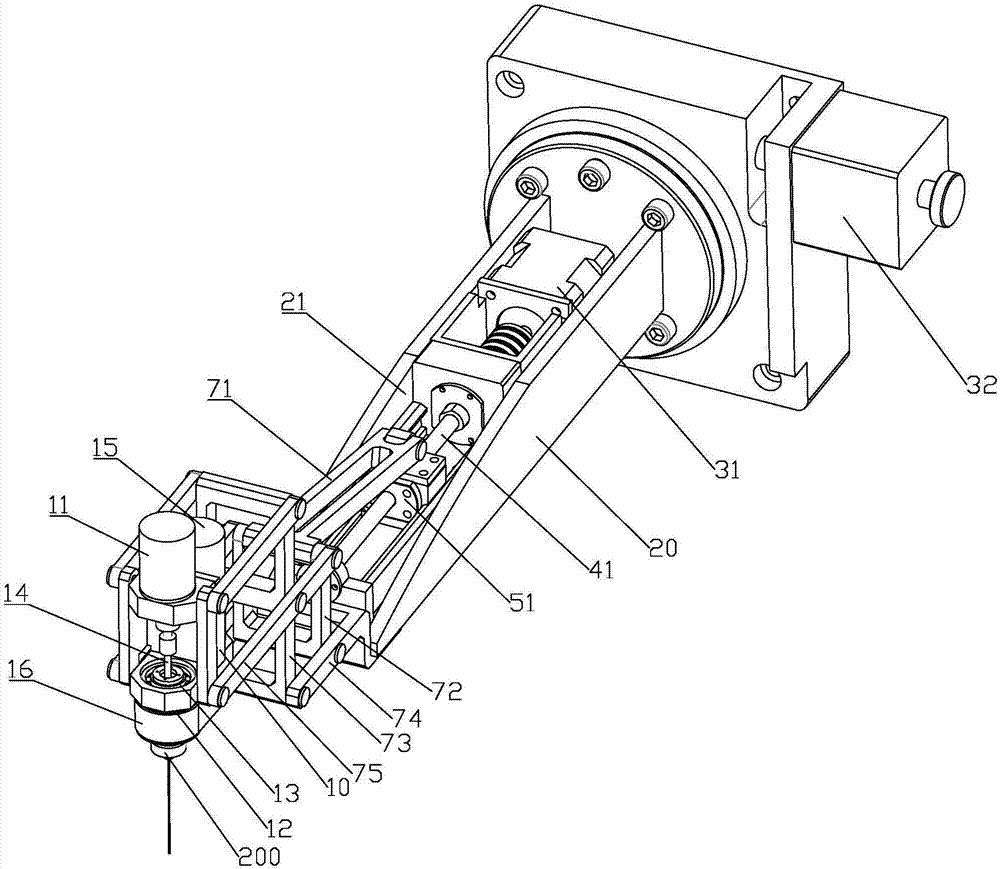
[0031] Such as figure 2 , image 3 and Figure 4 As shown, the fully automatic eye surgery robot includes a fixed frame 10 , a linear motor 11 and a rotatable pulley 12 . The fixing bracket 10 has a through hole 13 . The linear motor 11 has a linearly movable spindle 14 . The linear motor 11 and the pulley 12 are respectively arranged on the upper and lower sides of the through hole 13 . The pulley 12 is rotatably arranged. Surgical forceps 100 are fixedly installed on the belt pulley 12. The forceps have movable piston rods (not shown in the figure). When the mandrel 14 of the linear motor 11 moves linearly, it can pass through the through hole 13 to drive the piston rod of the surgical forceps 200 to move. When the piston rod 202 of the surgical forceps 200 moves, the two forceps feet 203 are driven to open or close, so as to clamp the eyeball tissue. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More