

Radio Map classified locating method based on UE speed
A positioning method and speed technology, applied in the direction of instruments, character and pattern recognition, electrical components, etc., can solve the problems of low positioning accuracy, short signal fingerprints, fingerprint mismatch, etc., and achieve the effect of improving positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0030] Specific implementation mode 1: The specific process of a UE speed-based Radio Map classification and positioning method in this implementation mode is as follows:
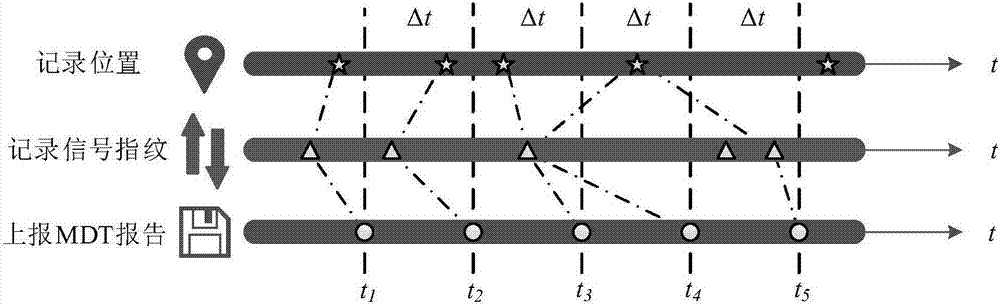
[0031] Step 1, obtaining DT, CQT and MDT sampling points;
[0032] The DT is a drive test; the CQT is a call quality test, and the MDT is a minimum drive test;
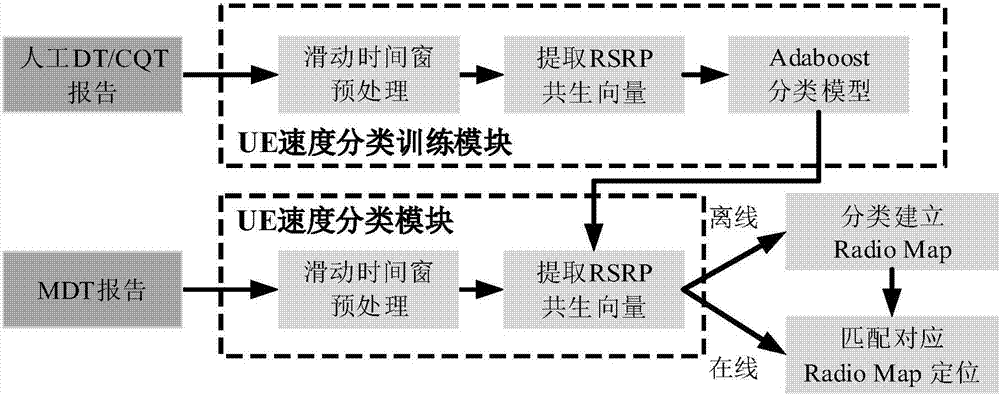
[0033] Step 2. Extract RSRP co-occurrence vectors from the DT / CQT / MDT sampling points obtained in Step 1;
[0034] The RSRP is a reference signal received power;
[0035] Step 3, design a strong classification function based on the Adaboost classification algorithm according to step 2;
[0036] Step 4: Use the strong classification function trained in step 3 to construct an offline Radio Map;
[0037] The Radio Map is a location fingerprint map;
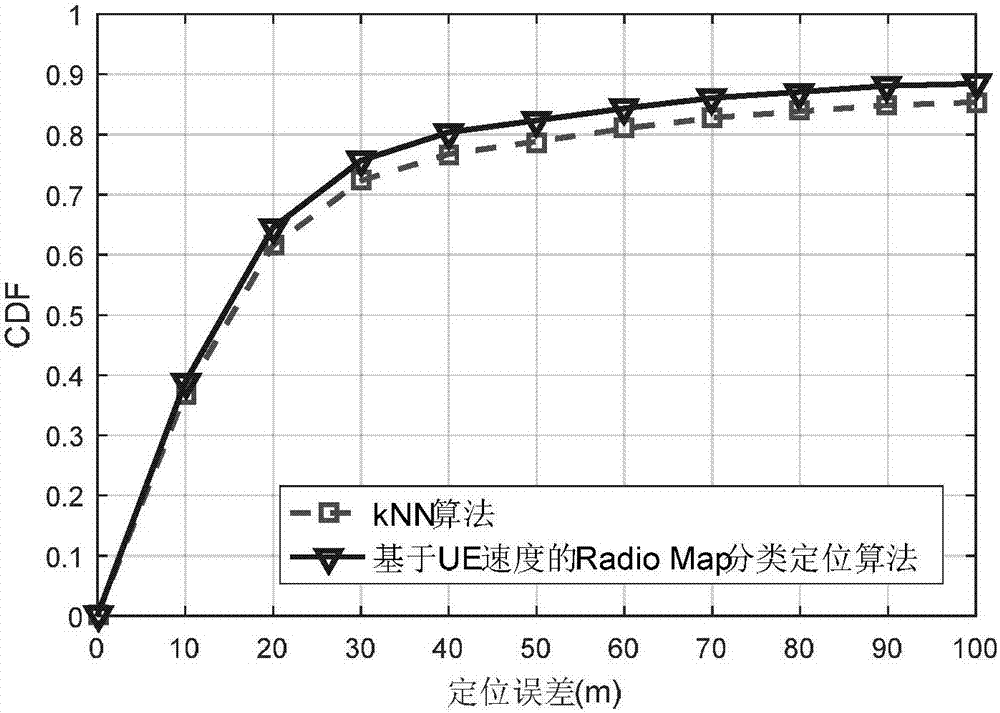
[0038] Step 5. Use the strong classification function trained in step 3 and the offline Radio Map obtained in step 4 to perform online positioning.
specific Embodiment approach 2
[0039] Embodiment 2: The difference between this embodiment and Embodiment 1 is that the DT / CQT / MDT sampling points are obtained in the step 1; the specific process is:
[0040] Step 11: Obtain DT / CQT / MDT sampling point data packets from LTE network optimization data, mark DT sampling points as high-speed moving UEs, CQT sampling points as low-speed moving UEs or static UEs, and MDT sampling points without motion tags; UE is a user terminal equipment (User Equipment);
[0041] UE speed greater than or equal to 30km / h is high speed, UE speed less than 30km / h is low speed;
[0042] Step 1 and 2: Set the latitude and longitude of DT, CQT and MDT sampling points with location Carry out position gridding, and fix the sampling point position at the nearest grid node. In order to match the effective digits of longitude and latitude with the positioning accuracy of GPS, set the grid interval to 1 meter; calculated by formula (3) The longitude difference and latitude difference corr...
specific Embodiment approach 3
[0058] Specific embodiment three: the difference between this embodiment and specific embodiment one or two is: in the step two, extract the RSRP co-occurrence vector from the DT / CQT / MDT sampling point obtained in step one; the specific process is:
[0059] Step 21: Filter the sampling points of the same IMSI from the DT / CQT / MDT sampling points obtained in step 1, that is, the sampling points reported by the same terminal; arrange the sampling points of the same IMSI in ascending order of Timestamp; at the sampling points of the same IMSI A sliding time window is added to the sequence, the window length is 60s, and the sliding interval is 12s;
[0060] The IMSI is an International Mobile Subscriber Identity;
[0061] Timestamp measures the timestamp for the current test sampling point;
[0062] Step 22: Within a time window, select the cell c with the highest detection ratio from multiple main cells or neighboring cells detected by the UE, and extract its RSRP vector R c , ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More