

Curtain wall robot capable of walking stably and control method
A control method and robot technology, which is applied in the direction of automatic control of traveling motion, window cleaning, cleaning equipment, etc., can solve problems affecting the stability and safety of high-altitude curtain wall cleaning robots, loss of suction, and decrease in adsorption force. Market prospect and application prospect, realize the effect of simple principle
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
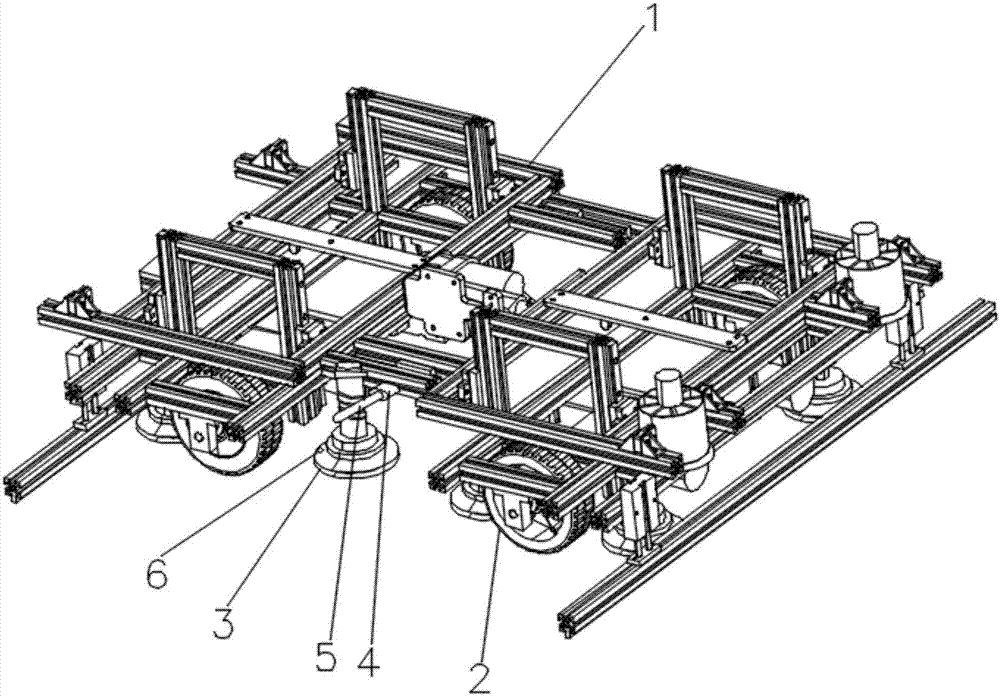
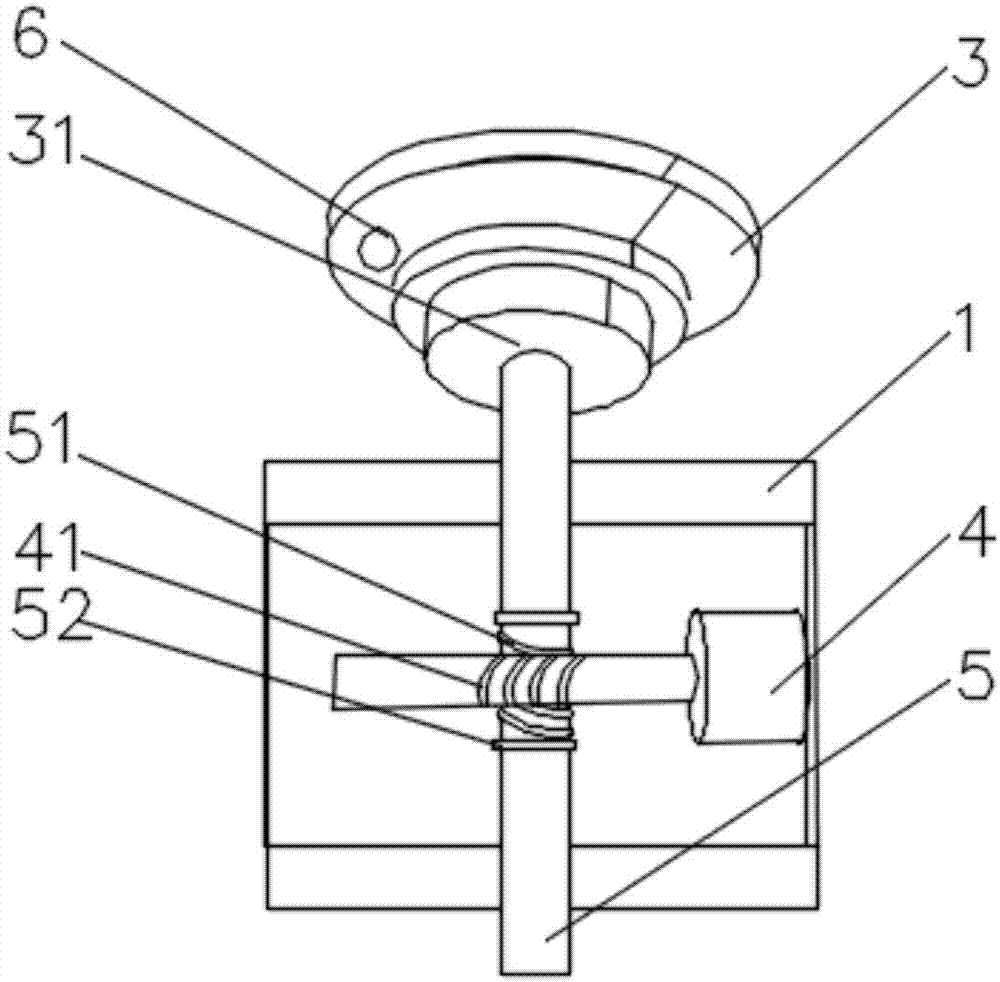
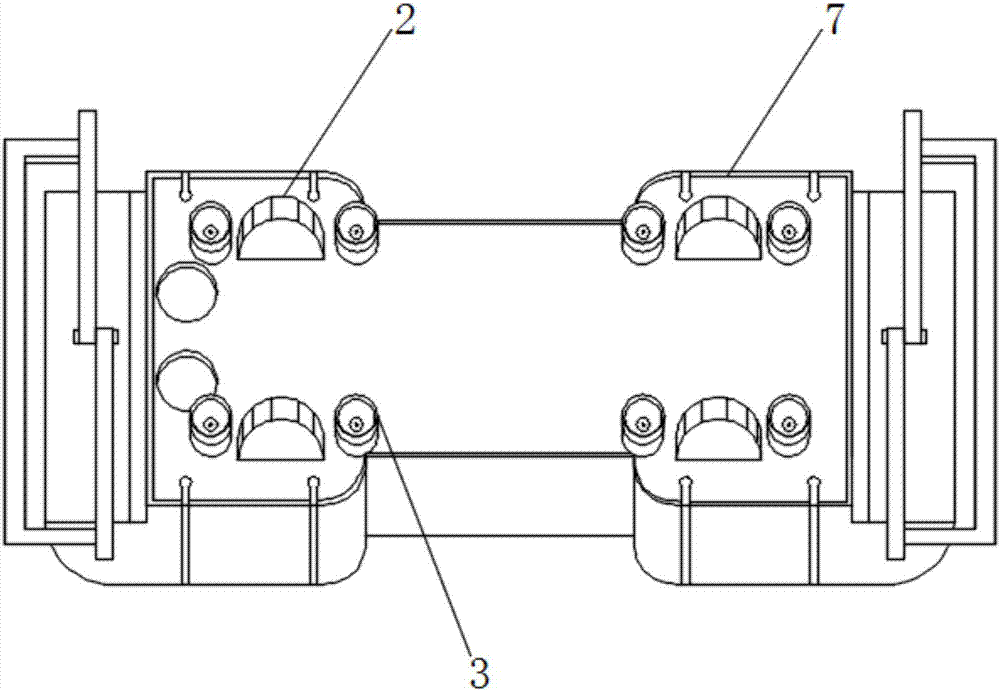
[0038] Example 1, please refer to Figure 1-3 , the present invention provides a technical solution: a curtain wall robot with stable walking, including a frame 1 and a control device, a driving device, a vacuum device, a driving wheel 2, a suction cup 3, a motor 4, screw 5 and vacuum negative pressure sensor 6; the drive device is used to drive the drive wheel 2 to walk on the curtain wall; One end is fixedly connected, and the other side of the suction cup 3 is in contact with the curtain wall; the motor 4 is connected to the screw 5 to drive the screw 5 up and down; the vacuum device is connected to the suction cup 3 to make the suction cup 3 to form a vacuum state; the vacuum negative pressure sensor 6 is connected to the control device, and the vacuum negative pressure sensor 6 is used to sense and detect the vacuum degree in the sucker 3; the control device is connected to the driving device As well as the motor 4, the control device controls the driving device, and con...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More