

Task planning method for indoor visual-guidance AGV
A task planning and visual guidance technology, applied in two-dimensional position/course control, non-electric variable control, instruments, etc., can solve problems such as high cost, single task planning method, and difficult path maintenance and change The effect of small impact
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be further explained below in conjunction with the accompanying drawings and specific embodiments.
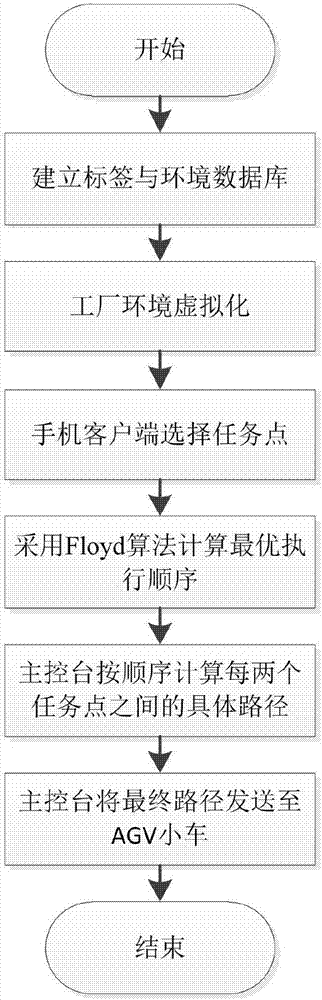
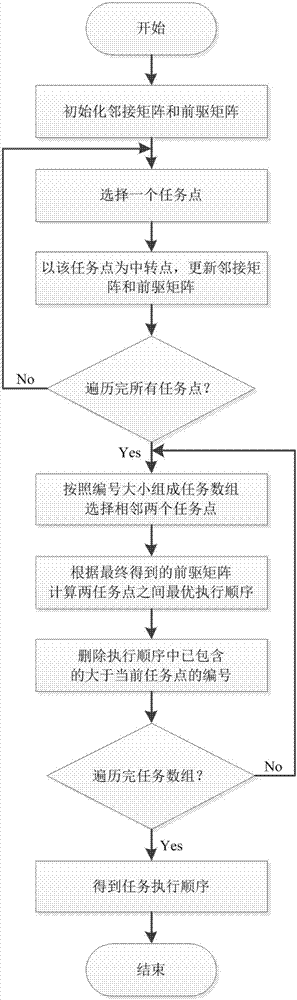
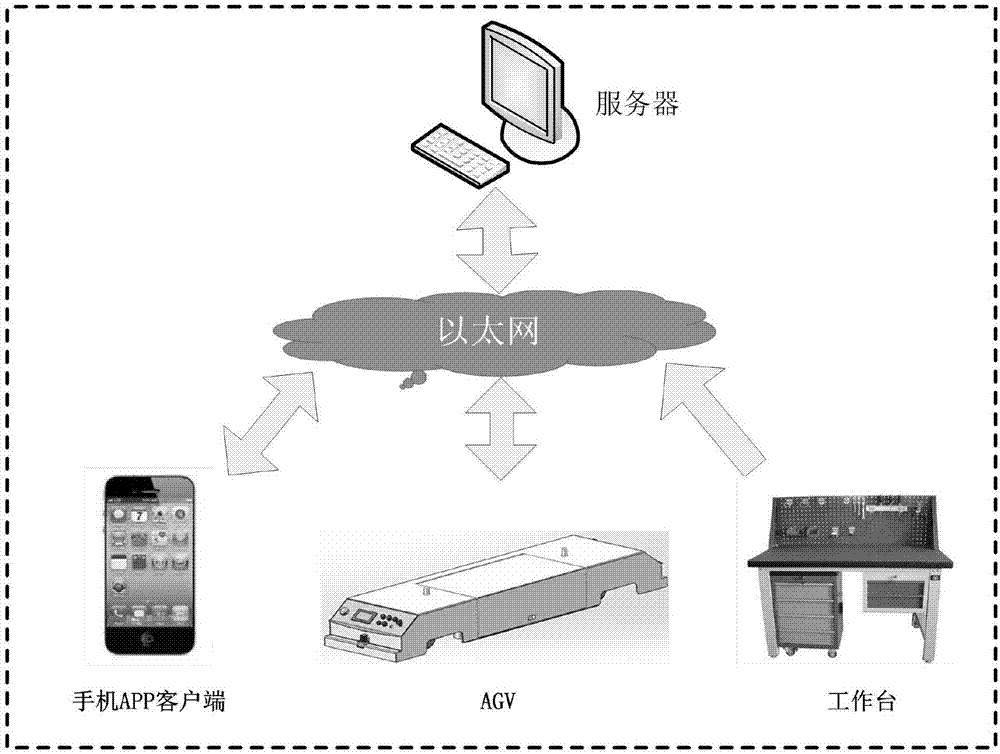
[0036] The invention provides a scheme for task planning of an AGV trolley. Through specific environmental digital tags, the entire factory is virtualized into a two-dimensional plane containing coordinate information. All AGV cars running in the factory can be regarded as points with constantly changing coordinates in this two-dimensional plane. The real-time coordinate position of the AGV car is identified by Environmental digitization stickers affixed to the ceiling are identified. At the same time, a communication system with WIFI as the medium is established, which includes the main console server, Android mobile phone, AGV car and workbench. Among them, the workbench is distributed in the factory, which is the potential task address of the AGV trolley. The main console is responsible for the scheduling and planning of the entire system,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More