Robot grabbing system and workpiece grabbing method
A robot and workpiece picking technology, which is applied in the field of robots, can solve the problems of real-time performance that cannot meet the requirements of industrial sites, complex algorithms, and large amount of calculation, and achieve the effects of high real-time performance, reduced imaging quality, and improved positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The following describes the specific implementation of the present invention in further detail through the description of the embodiments with reference to the accompanying drawings. The purpose is to help those skilled in the art have a more complete, accurate and in-depth understanding of the concept and technical solutions of the present invention, and Contribute to its implementation.
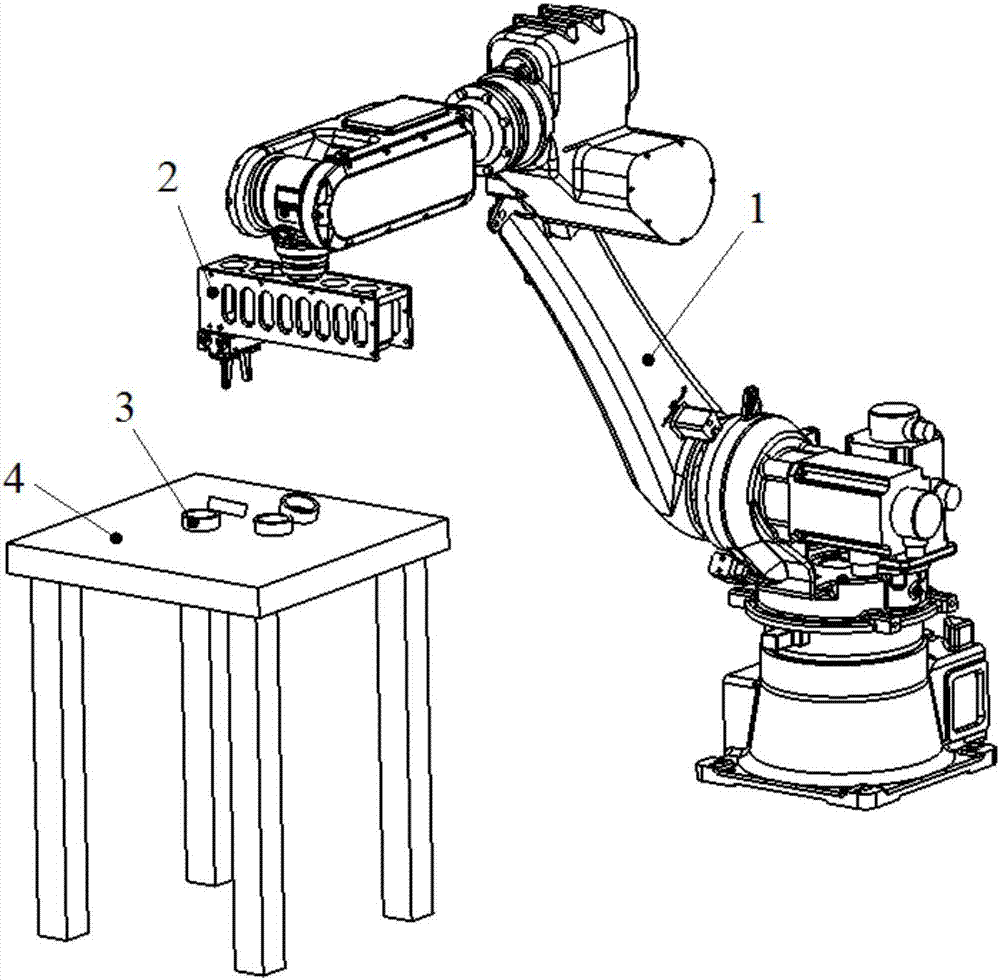
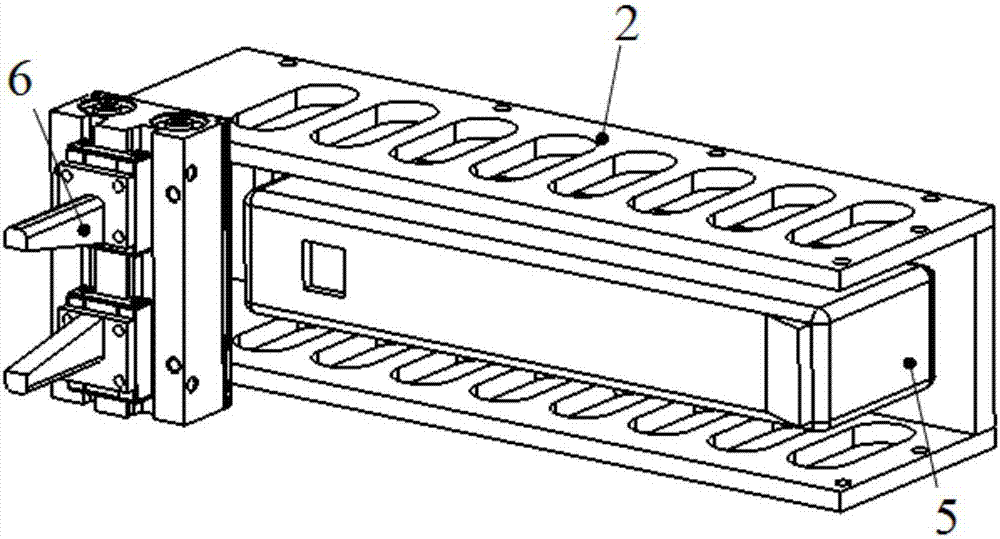
[0026] Such as figure 1 with figure 2 As shown, the present invention provides a robot grasping system, including a control device, a visual inspection device, and a grasping execution device for grasping a workpiece and connected with the visual inspection device. The visual inspection device includes a visual sensor for capturing images. 5.
[0027] Specifically, such as figure 1 with figure 2 As shown, the grasping execution device includes an industrial robot 1, an actuator support 2 connected to the industrial robot 1, and a clamp 6 arranged on the actuator support 2 and used for g...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com