

Obstacle clustering method and obstacle clustering device
A technology of obstacles and obstacles, applied in the field of obstacle clustering methods and devices, capable of solving problems such as obstacle detection deviations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0071] Specific embodiments of the present disclosure will be described in detail below in conjunction with the accompanying drawings. It should be understood that the specific embodiments described here are only used to illustrate and explain the present disclosure, and are not intended to limit the present disclosure.
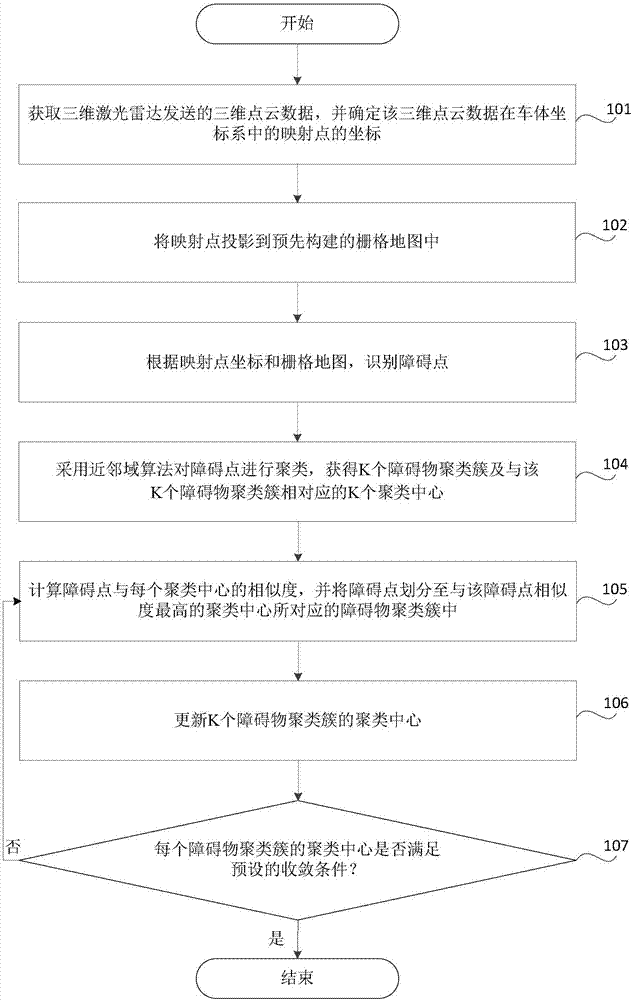
[0072] figure 1 It is a flow chart of an obstacle clustering method according to an exemplary embodiment. Such as figure 1 As shown, the method may include the following steps:
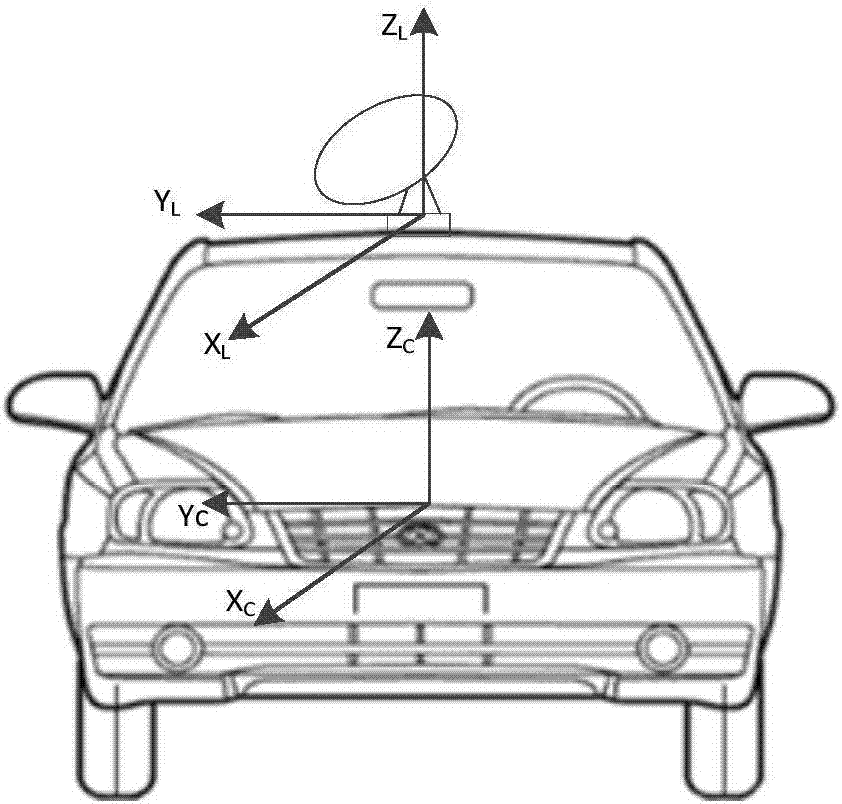
[0073] In step 101, the 3D point cloud data sent by the 3D laser radar is obtained, and the coordinates of the mapping points of the 3D point cloud data in the vehicle body coordinate system are determined.
[0074] In the present disclosure, the obstacle clustering method can be applied to an obstacle detection system. In the local area network, the 3D lidar sends the collected 3D point cloud data in the form of User Datagram Protocol (UDP) broadcast packets, where the UDP data ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More