

Autonomous rendezvous strategy for non-cooperative targets based on null space method
A non-cooperative target and zero-space technology, applied in adaptive control, instruments, control/regulation systems, etc., can solve problems such as motion information acquisition, non-cooperative autonomous safety rendezvous difficulties, etc., to achieve the effect of ensuring safety and avoiding conflicts
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
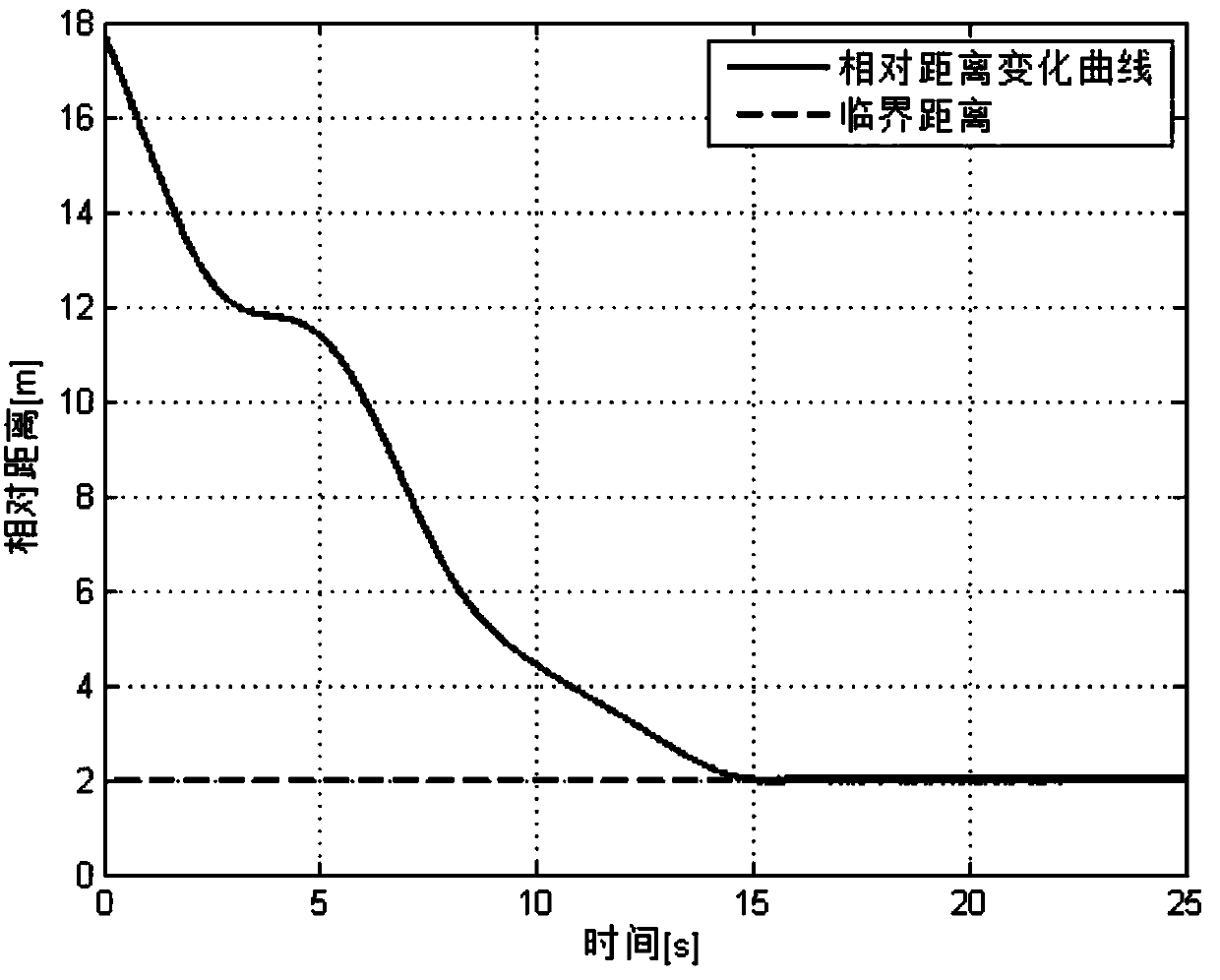
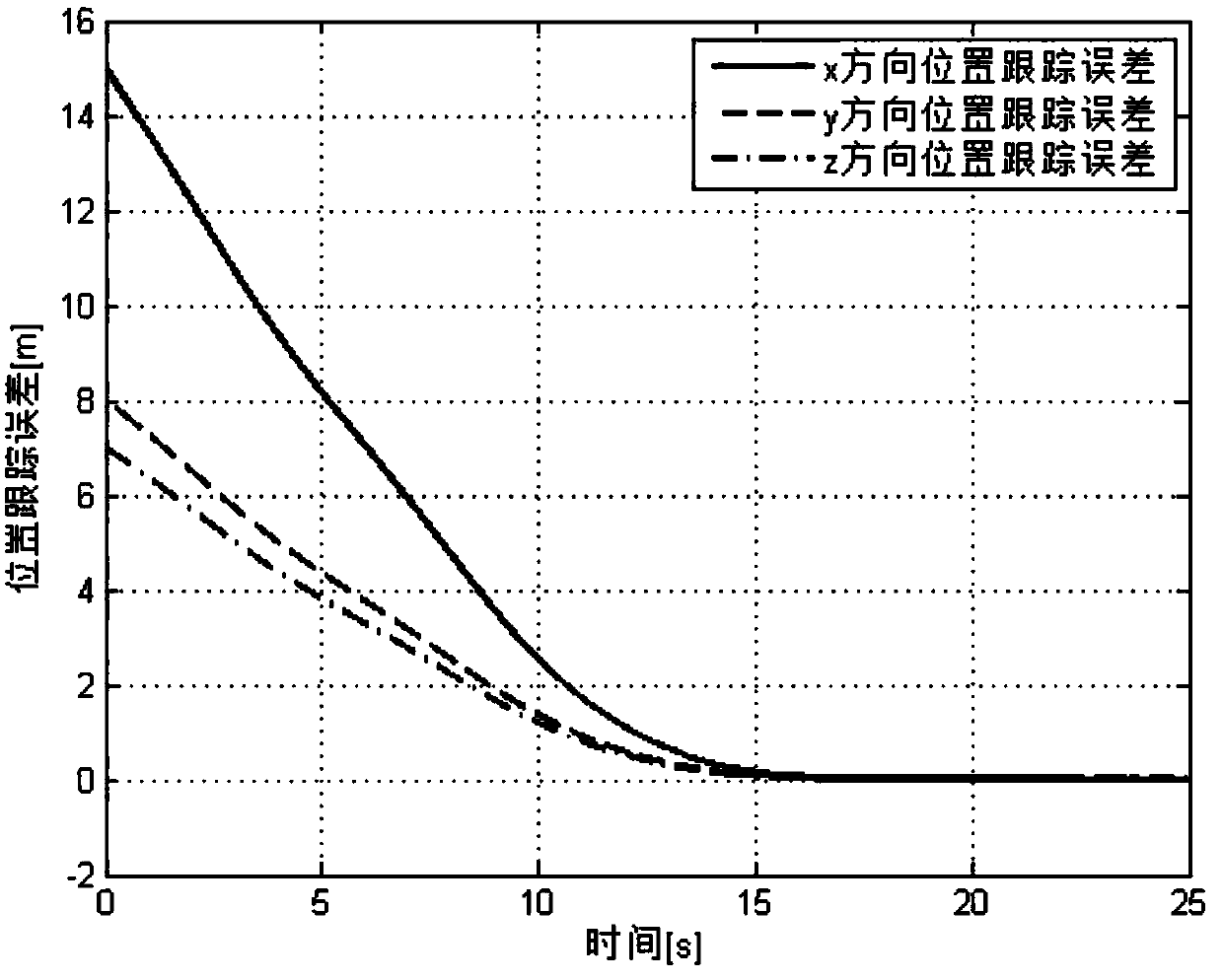
[0053] The invention provides a non-cooperative target autonomous rendezvous strategy based on a zero-space method, and designs a safe rendezvous trajectory during the autonomous rendezvous process of the space non-cooperative target to ensure that the serving spacecraft avoids collision with the non-cooperative target in the process of approaching the non-cooperative target.
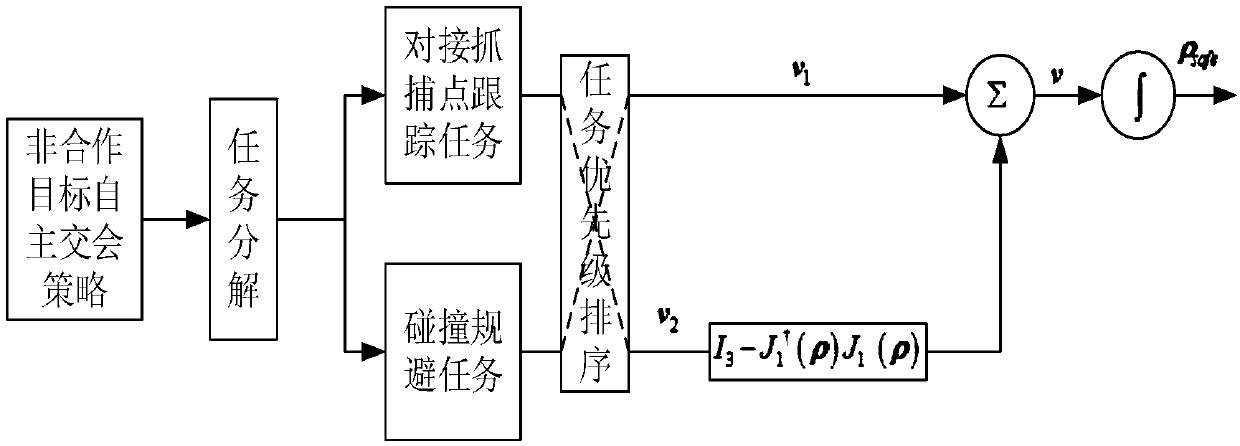
[0054] see figure 1 , the present invention discloses a non-cooperative target autonomous rendezvous strategy based on a zero-space method. Firstly, a task analysis is performed on the autonomous rendezvous process, and the entire rendezvous process is divided into a non-cooperative target docking capture point tracking task and a collision avoidance task. Prioritize the non-cooperative target docking capture point tracking task and collision avoidance task, and solve the null space corresponding to each basic task, and finally capture the non-cooperative target docking according to the null space method...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More