

Leg device with interaction force parameter measurement for lower limb rehabilitation exoskeleton robot
An exoskeleton robot and parameter measurement technology, which is applied in the direction of equipment to help people walk, physical therapy, etc., can solve the problems of unfavorable assisted walking, redundant degrees of freedom, and low wearing comfort, so as to facilitate gait planning and improve comfort The effect of large speed and driving force
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments, but not as a limitation of the present invention.
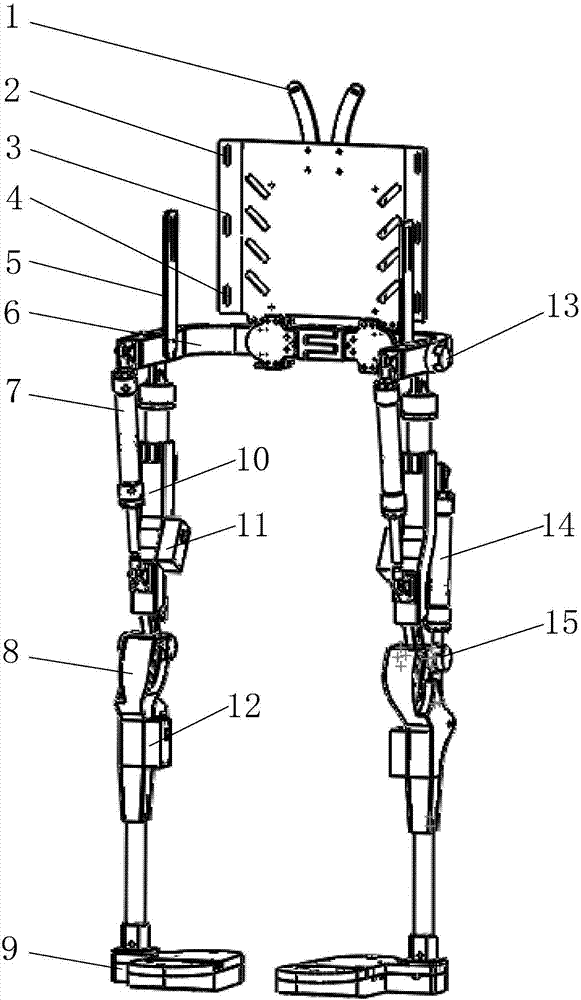
[0031] see figure 1 and figure 2 , a wearable lower limb rehabilitation exoskeleton robot for assisting walking, mainly includes back, waist, hip joints, thighs, knee joints, calves, ankle joints and feet, considering the extreme conditions of lower limb injuries, the hip Both the joint and the knee joint are equipped with actuator hydraulic cylinders, thus forming a complete lower limb rehabilitation exoskeleton robot.
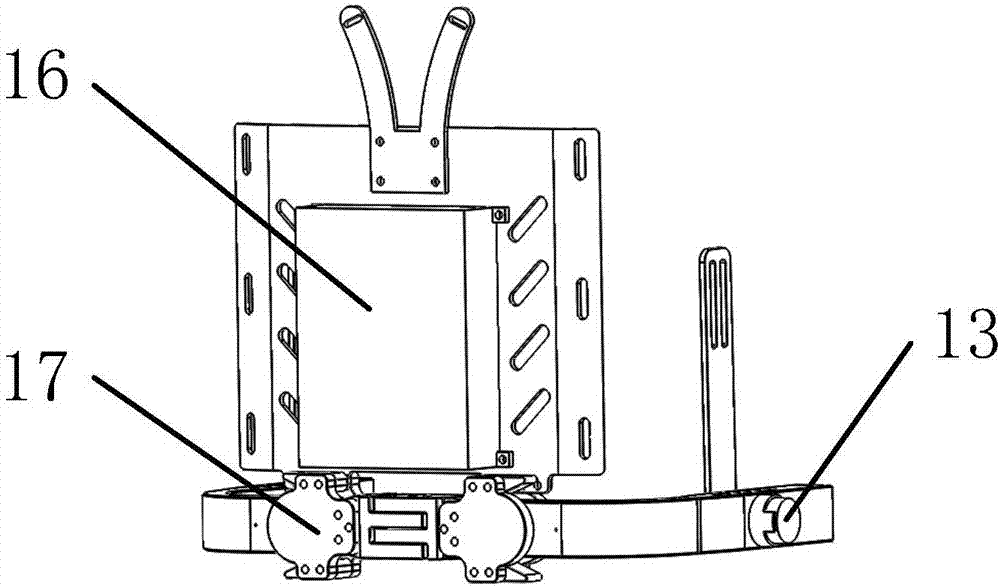
[0032] refer to figure 1 and figure 2 , a complete back structure diagram is given. The control cabinet 15 is the control center and power supply of the entire exoskeleton robot, which is fixed on the back of the exoskeleton; the shoulder strap fixing hole 1 leads to the strap, which is fixed on the waist strap around the shoulder Hole 4; there are two chest strap fixing ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More