

A bionic quadruped robot leg mechanism
A quadruped robot and foot-end technology, which is applied in the fields of motor vehicles, transportation and packaging, etc., can solve the problems of poor encapsulation of the overall mechanism, achieve good maintainability, reduce manufacturing costs, and achieve high transmission efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
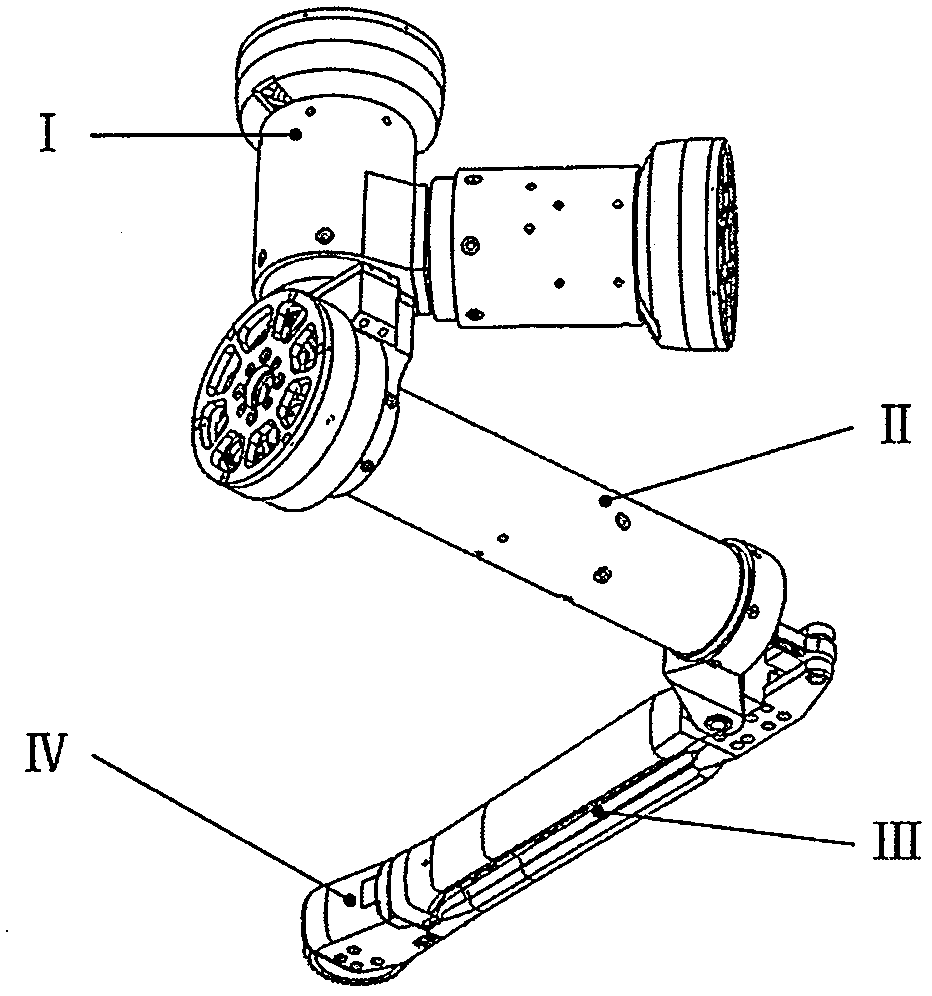
[0028] Such as figure 1 As shown, a bionic quadruped robot leg mechanism includes a hip joint transmission module I, a knee joint transmission module II, a calf module III and a foot end module IV, and is characterized in that: the hip joint transmission module I is connected to the knee joint transmission module II, The calf module III connects the knee joint transmission module II and the foot end module IV. The hip joint transmission module I controls the hip joint abduction and adduction of the robot leg and the flexion and extension of the hip joint. The knee joint transmission module II controls the flexion and extension of the knee joint.
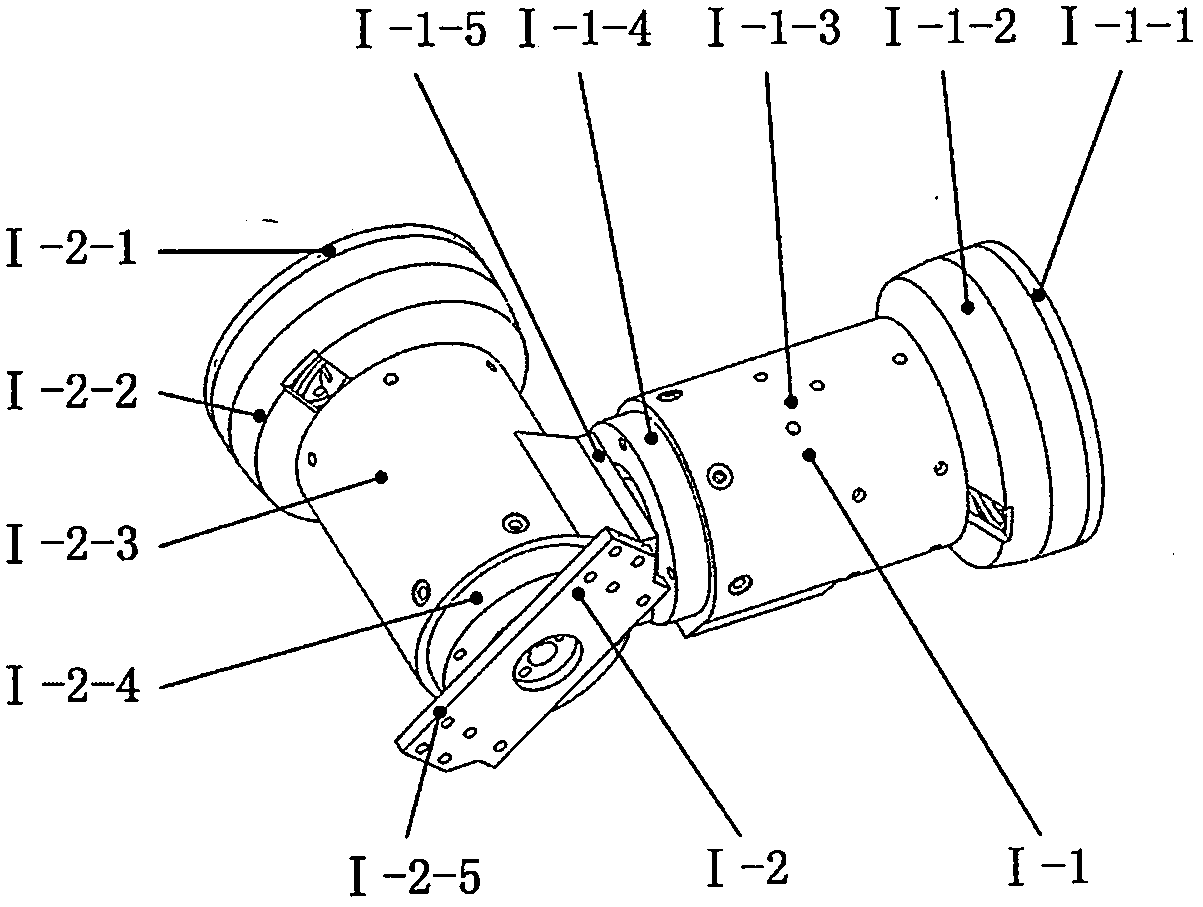
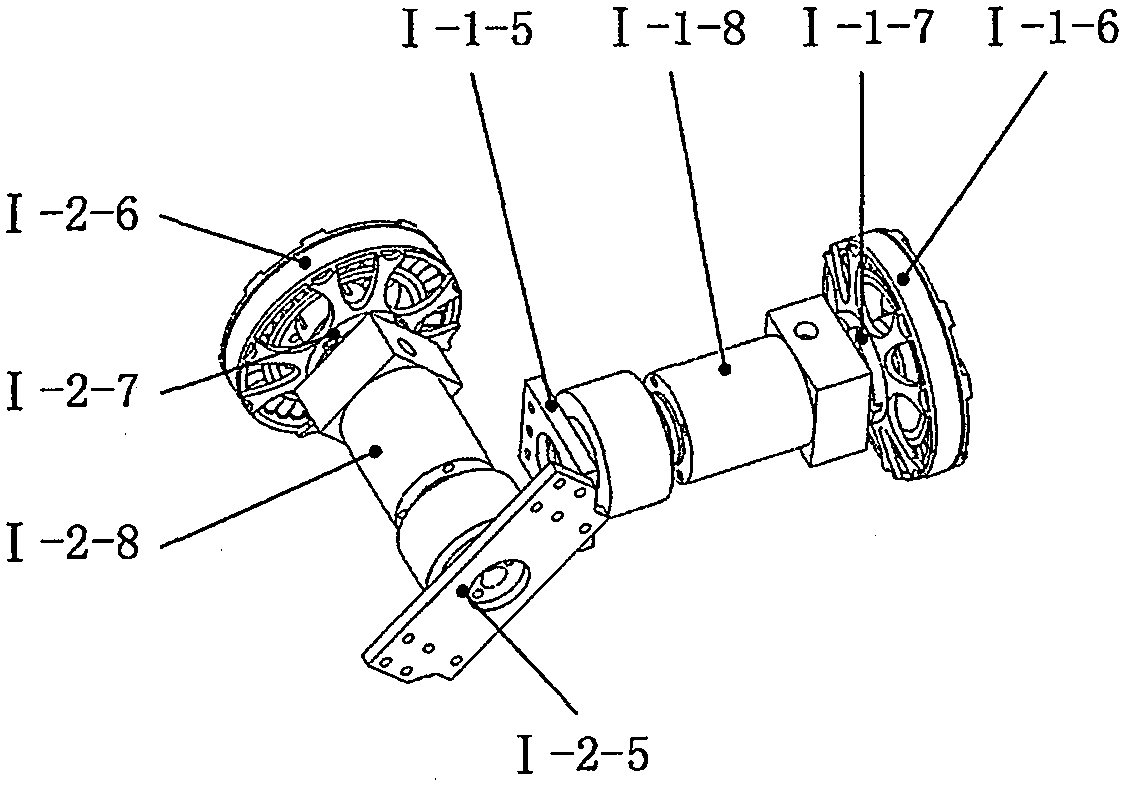
[0029] Such as figure 2 with 3 As shown, the hip joint drive module I includes two hip joint motor end covers I-1-1 and I-2-1, two hip joint motor housings I-1-2 and I-2-2, two hip joints Planetary reducer housing I-1-3 and I-2-3, two joint connection component housings I-1-4 and I-2-4, hip joint connection component I-1-5, hip and kn...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More