Method for monitoring state of underwater vehicle based on fuzzy support vector domain description
A fuzzy support vector, underwater robot technology, applied in instruments, adaptive control, control/regulation systems, etc., can solve the problem of not considering the importance of AUV data samples, unable to judge the severity of AUV thruster failures, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
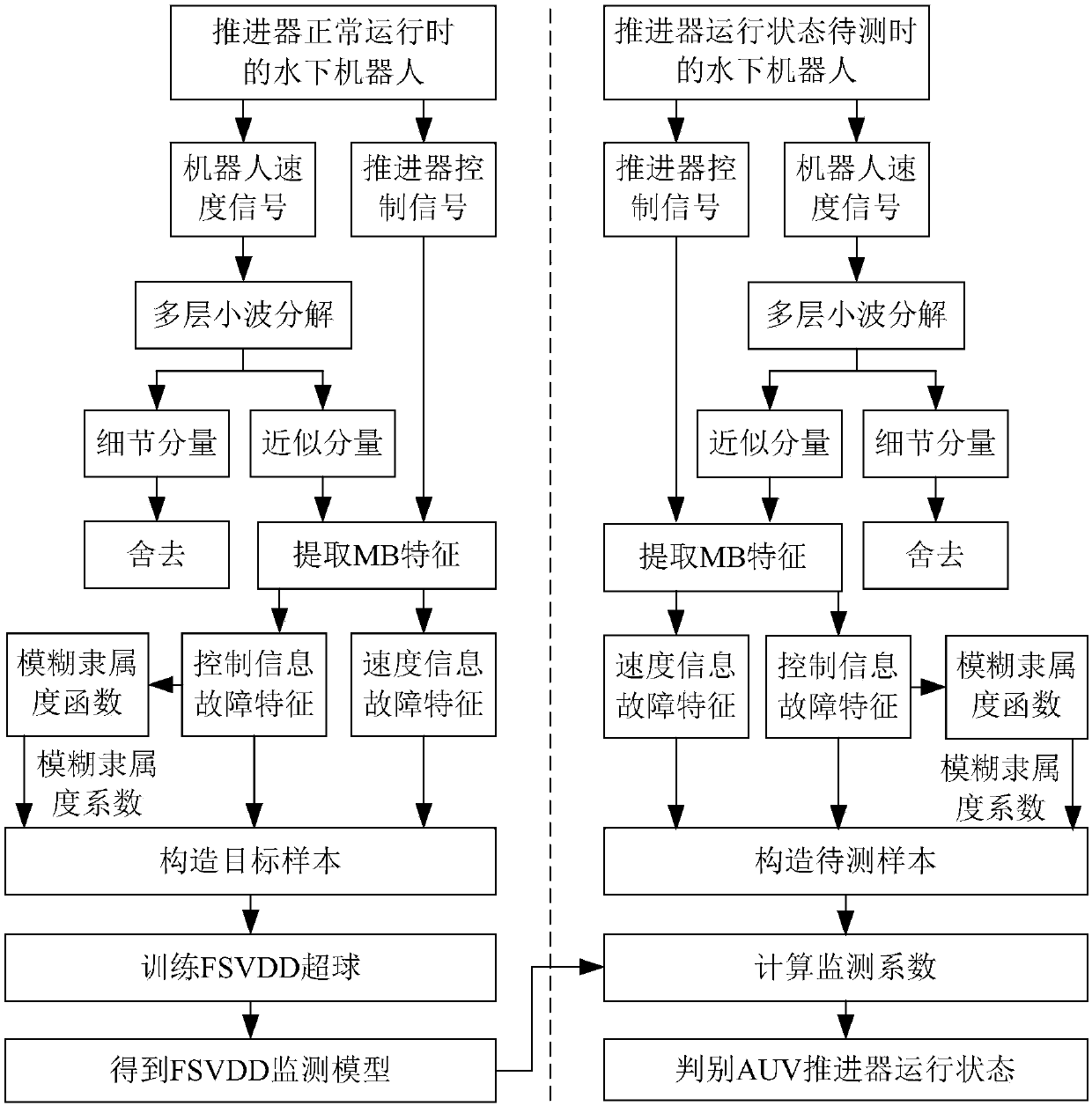
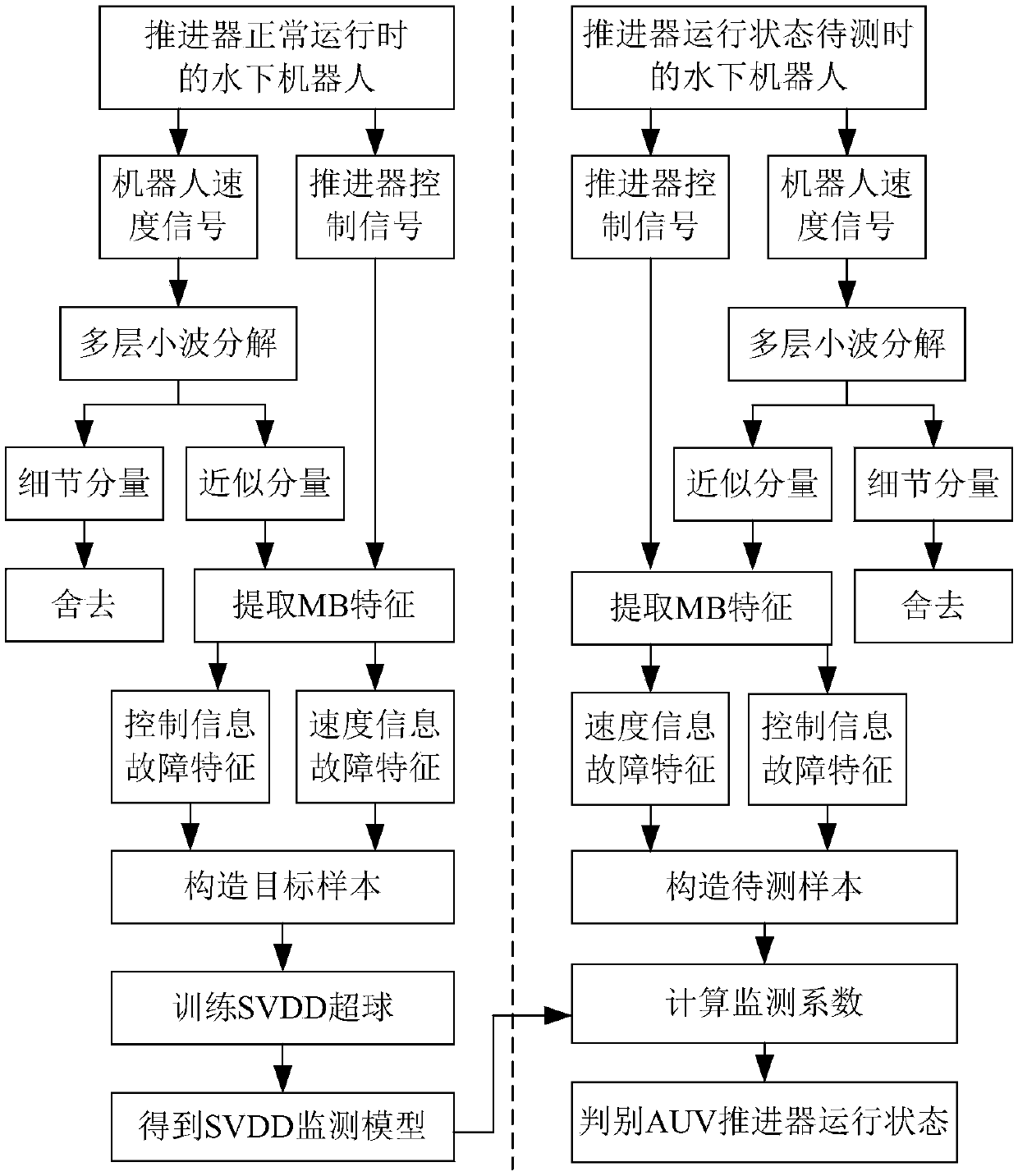
[0039] figure 1 It is a block diagram of the status monitoring structure of the AUV thruster patented by the present invention. combine figure 1 , the specific implementation steps of the state monitoring method of underwater robot propeller based on fuzzy support vector description are as follows:
[0040] (1) Perform wavelet decomposition on the AUV longitudinal velocity signal when the thruster is in normal operation, the number of decomposition layers is 3, and the wavelet basis function is DB4 wavelet. The wavelet approximate components are extracted from the decomposition results, and the wavelet detail components are discarded.
[0041] (2) Construct the target sample:
[0042] Based on the modified Bayesian algorithm, the characteristic information is extracted from the wavelet approximate component of the AUV longitudinal...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More