

Mechanical paw with limiting device
A technology of manipulator claw and limit device, which is applied to manipulators, chucks, manufacturing tools, etc., can solve the problems of inability to grasp and capture, unable to provide relative state information, etc., and achieve fast, reliable and stable grasping and releasing, simple structure, The effect of fast penetrating piercing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
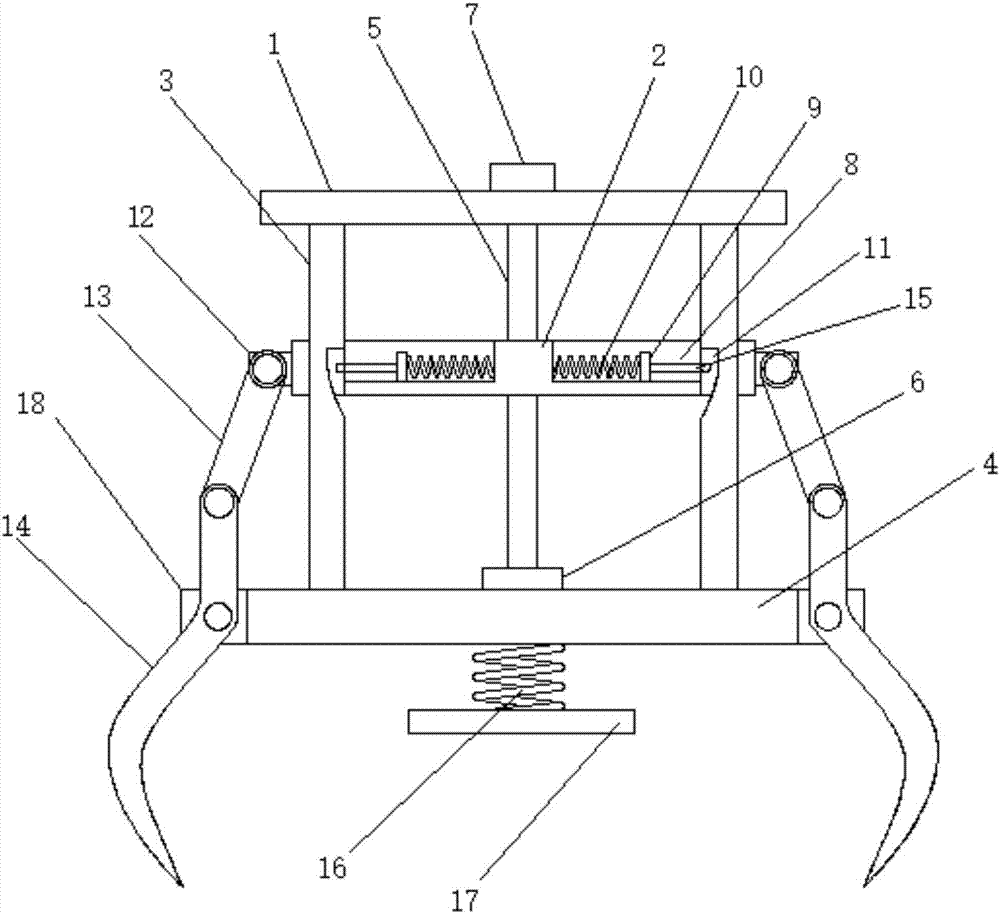
[0014] see figure 1 , in an embodiment of the present invention, a mechanical gripper with a limit device includes an upper disk 1, a push disk 2 and a chassis 4, the push disk 2 is located between the upper disk 1 and the chassis 4, and the upper disk 1 The side of the lower end surface is provided with a plurality of fixed rods 3 that pass through the push plate 2 and are fixedly connected to the upper end surface of the chassis 4, and the center of the uppe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More