

Obstacle recognition method and device
An obstacle recognition and obstacle technology, applied in scene recognition, character and pattern recognition, two-dimensional position/channel control and other directions, can solve the problems of low obstacle recognition efficiency, large system resource consumption, and large amount of calculation, etc. To achieve the effect of reducing the amount of calculation, improving efficiency and reducing consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
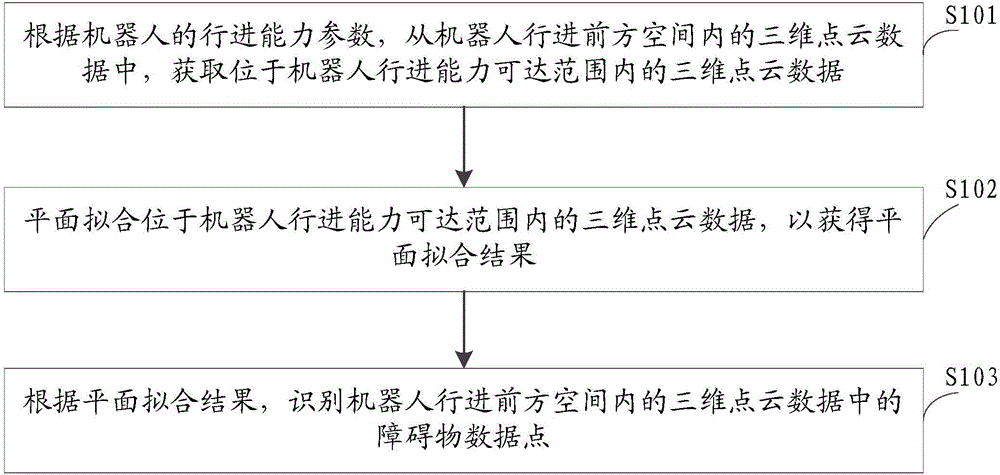
[0098] The first implementation mode: if the plane fitting result is to fit a space plane, according to the inclination angle of the space plane, identify the obstacle data points in the 3D point cloud data located in the space in front of the robot.
[0099] Optionally, an error threshold is preset, and the selected three-dimensional point cloud data is fitted to a plane according to the least square method, so as to obtain a space plane with a fitting error not greater than the error threshold. Of course, in addition to the least square method, algorithms such as genetic algorithm and neural network algorithm can also be used for plane fitting.
[0100] The following is the process of plane fitting according to the method of least squares:
[0101] The spatial plane expression may be z=Ax+By+C, and the spatial plane is determined by determining the coefficients A, B, and C. First, A and B can be determined according to formula (4).
[0102]
[0103] Among them, the 3D p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More