Cable retracting device for wired control robot and cable retracting method
What is AI technical title?
AI technical title is built by PatSnap AI team. It summarizes the technical point description of the patent document.
A wired control, retractable and unwinding device technology, applied in the field of robots, can solve the problems of affecting cable release, difficult to collect, manual operation, etc., to achieve the effect of orderly retraction, stable and reliable cable release and retraction, and ensure stable transmission
Active Publication Date: 2018-09-21
XIAN UNIV OF SCI & TECH
View PDF9 Cites 1 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
Adopting the cable laying method can reduce the occurrence of broken cables, but the cable releasing in the prior art mostly adopts passive cable releasing, such as the cable releasing device given in Li Yunwang's doctoral dissertation "Research on the Walking Mechanism of Mine Disaster Relief Robot". Composed of fiber optic winches and brackets, it adopts a passive cable release method. There is only a cable curling mechanism without a power source and a cable arrangement mechanism. For a long time, it is difficult to achieve good retraction, which will affect the next cable release; for this reason, it is necessary to consider the way of active cable release to achieve stable and reliable cable release and retraction by the robot. When using active cable release, It is also necessary to consider the issue of control to achieve the best control stability and effectiveness
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
Embodiment Construction
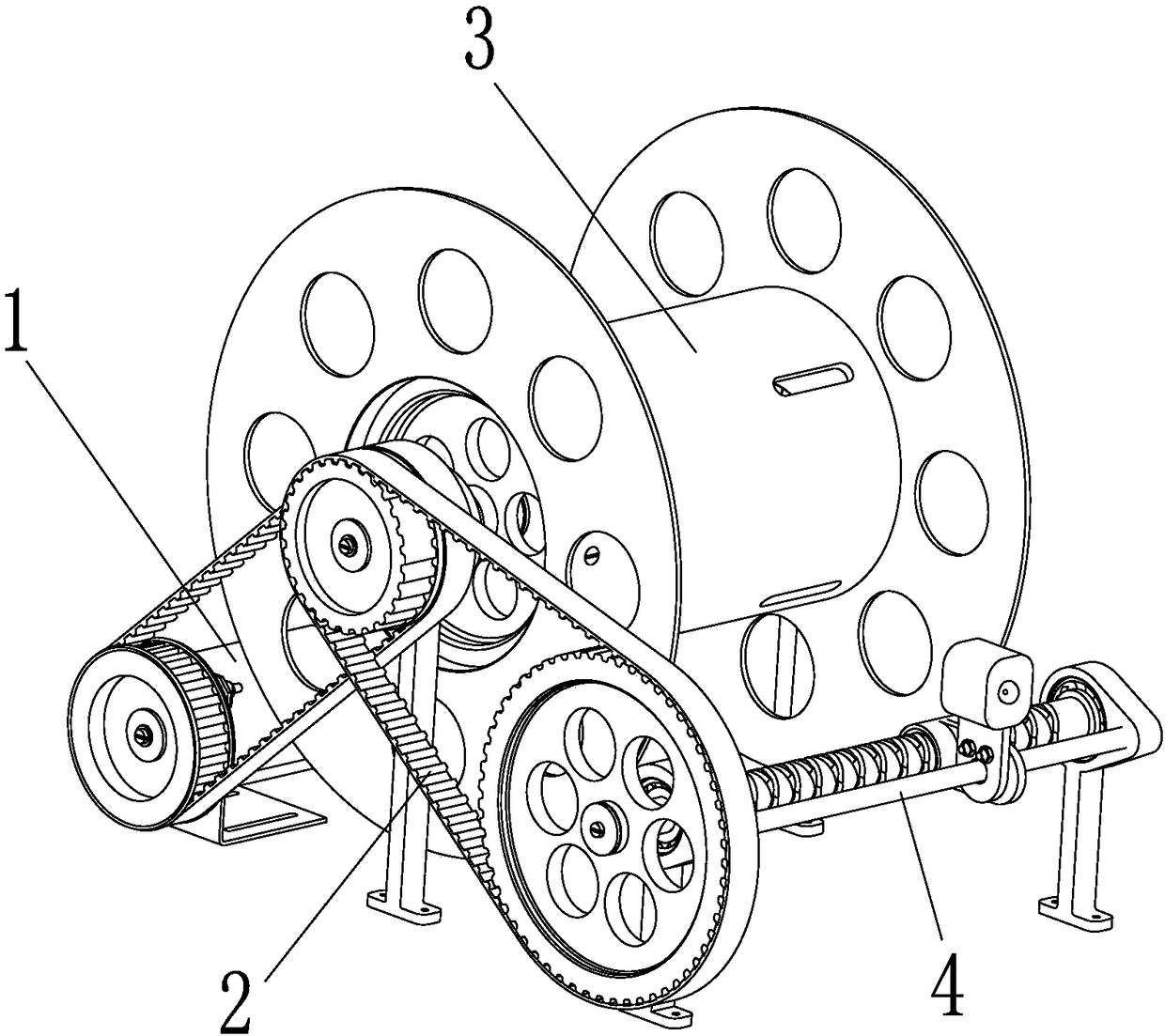
[0055] Such as figure 1 As shown, the cable retractable device for a wired control robot of the present invention includes a cable retractable motor 1 and a synchronous belt transmission mechanism 2 connected to the output shaft of the cable retractable motor 1, and is connected to the synchronous belt transmission mechanism 2. The connected cable winding mechanism 3 and the cable arrangement mechanism 4;
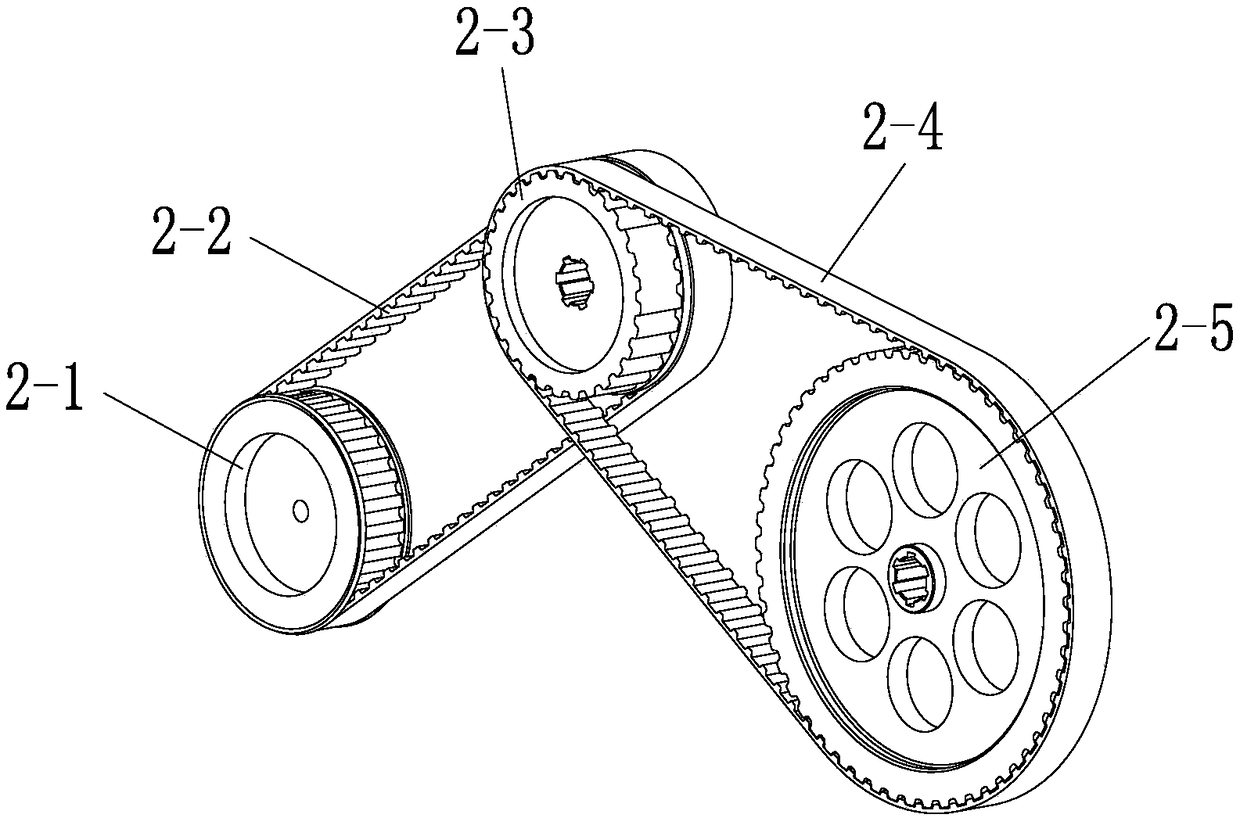
[0056] to combine figure 2 , the synchronous belt transmission mechanism 2 includes a main drive synchronous pulley 2-1, a reel drive synchronous pulley 2-3 and a lead screw drive synchronous pulley 2-5, the main drive synchronous pulley 2-1 and the reel A reel drive synchronous belt 2-2 is bridged on the reel drive synchronous pulley 2-3, and a lead screw drive synchronism is bridged on the reel drive synchronous pulley 2-3 and the lead screw drive synchronous pulley 2-5. Belt 2-4, the main drive synchronous pulley 2-1 is fixedly connected to the output shaft of the cab...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
The invention discloses a cable taking-up and paying-off device for a wire control robot. The cable taking-up and paying-off device for the wire control robot comprises a synchronous belt transmission mechanism, a cable winding mechanism, a cable arranging mechanism and a cable taking-up and paying-off motor. The synchronous belt transmission mechanism comprises a main driving synchronous belt wheel, a winding drum driving synchronous belt wheel, a lead screw driving synchronous belt wheel, a winding drum driving synchronous belt and a lead screw driving synchronous belt. The cable winding mechanism comprises a winding drum, a first winding drum support, a second winding drum support, a first winding drum bearing, a winding drum driving shaft, a winding drum driving wheel, a second winding drum bearing, a winding drum supporting shaft and a winding drum follower wheel. The cable arranging mechanism comprises a bidirectional lead screw, a first lead screw support, a second lead screw support, a first lead screw bearing, a second lead screw bearing, a lead screw sliding block, an unthreaded shaft and a cable guiding block. The invention further discloses a cable taking-up and paying-off method of the cable taking-up and paying-off device for the wire control robot. According to the cable taking-up and paying-off device and cable taking-up and paying-off method for the wire control robot, a cable can be taken up and paid off in order, the tightness is proper, the stability and effectiveness are good, the probability of intertwining and breaking of the cable is lowered, the practicability is high, and using and popularization are convenient.
Description
technical field [0001] The invention belongs to the technical field of robots, and in particular relates to a cable retracting device and a cable retracting method for a wired control robot. Background technique [0002] The power supply is the power source to ensure the robot's work, and the communication system ensures the two-way transmission of information between the mobile robot and the console, so that the operator can obtain the status and action information of the site and the robot itself, so as to effectively monitor and remotely operate the robot. There are two power supply methods for robots: external power supply and battery power supply. External power supply requires an external power line, and battery power supply has poor battery life. Robot communication methods include wireless communication and wired communication. The wireless module of wireless communication is small in size and easy to use. Convenient, but the bit error rate of data transmission is hi...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.



 Login to View More
Login to View More  Login to View More
Login to View More