

Vision calibration method and system, and unmanned aerial vehicle
A UAV and calibration technology, applied in the field of image recognition, can solve problems such as prone to errors, affecting the take-off of UAV, inconsistent orientation of UAV landing, etc., to reduce the frequency of occurrence, enrich geometric features, and improve accuracy Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
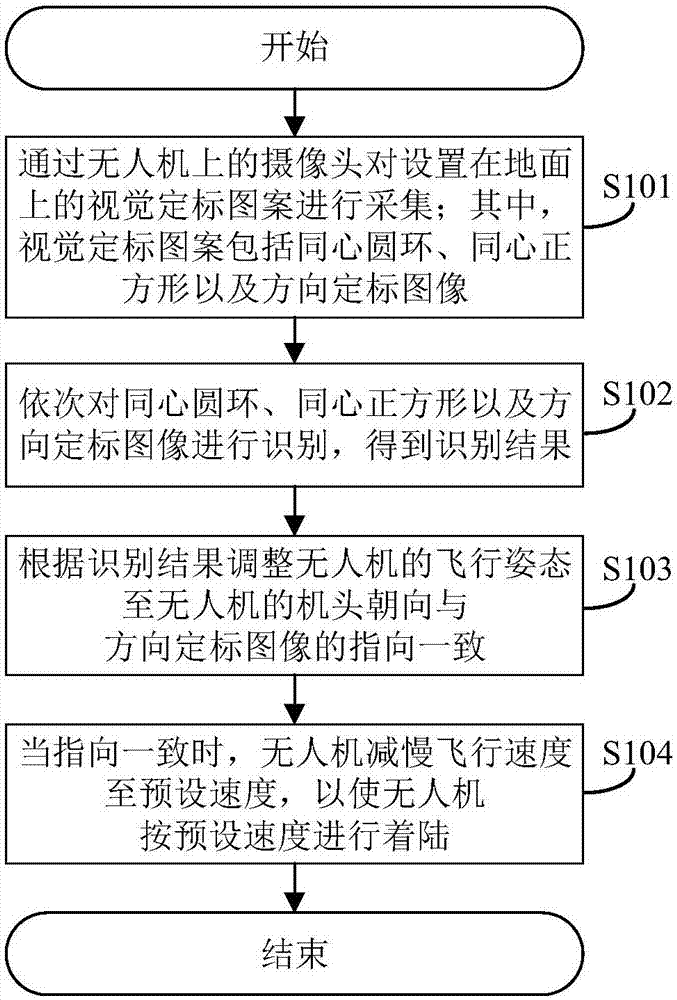
[0049] The core of this application is to provide a visual calibration method, system, and drone, which can enable the drone to recognize a visual calibration pattern with richer geometric features and easier image recognition, and improve unmanned The accuracy of autonomous landing of aircraft reduces the frequency of abnormal autonomous landing events.
[0050] In order to make the purpose, technical solutions and advantages of the embodiments of the present application clearer, the following will clearly and completely describe the technical solutions in the embodiments of the present application with reference to the drawings in the embodiments of the present application. Obviously, the described embodiments It is a part of the embodiments of this application, but not all the embodiments. Based on the embodiments in this application, all other embodiments obtained by those of ordinary skill in the art without creative work shall fall within the protection scope of this applic...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More