

Unmanned aerial vehicle formation path planning algorithm based on three-dimensional global artificial potential function
A path planning and unmanned aerial vehicle technology, applied in three-dimensional position/course control, vehicle position/route/altitude control, non-electric variable control, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0067] A UAV formation path planning algorithm based on a three-dimensional global artificial potential function proposed by the present invention will be described in detail below in conjunction with the accompanying drawings.
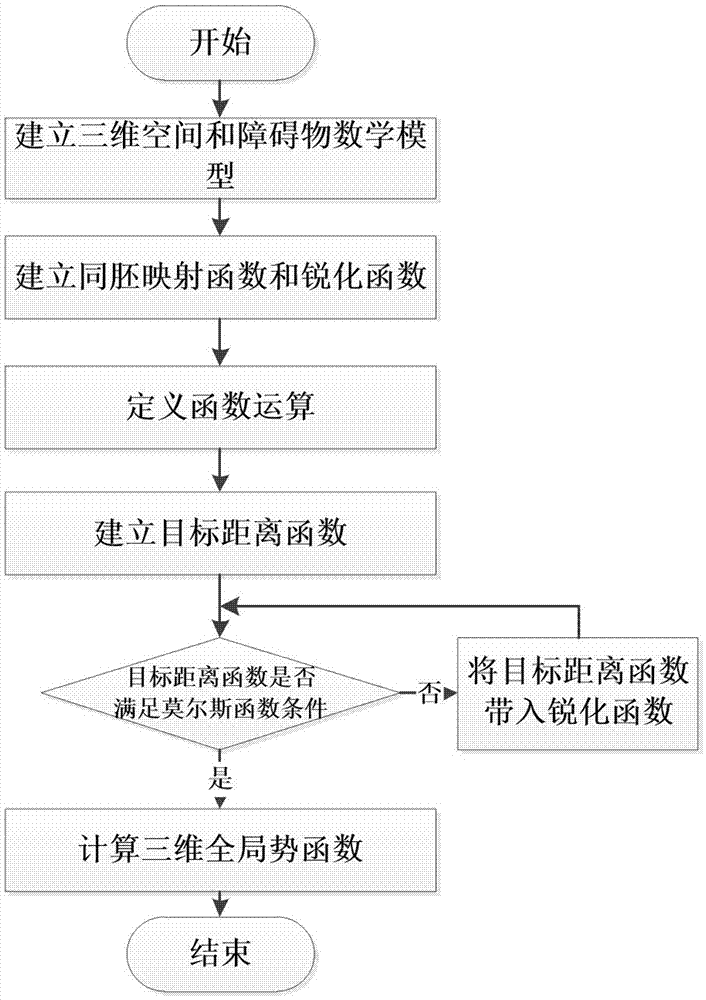
[0068] The UAV formation path planning algorithm based on the three-dimensional global artificial potential function of the present invention mainly includes the following steps:
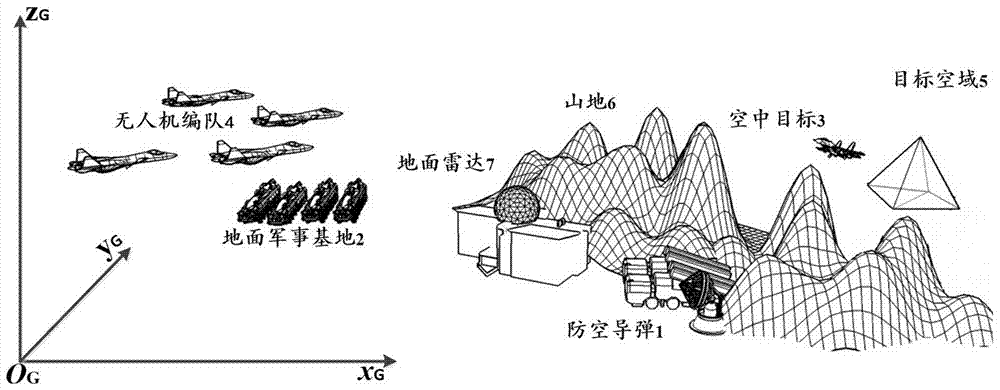
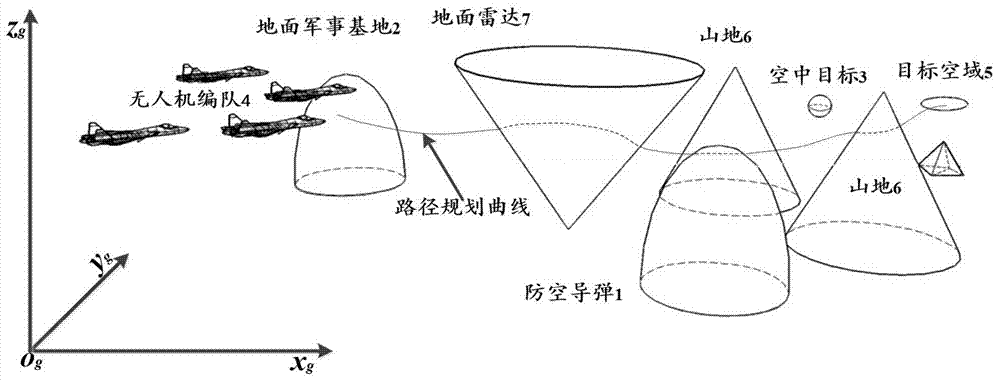
[0069] Firstly, the three-dimensional environment of the UAV formation and the mathematical model of obstacles in the three-dimensional space are established to obtain the global artificial potential function in the three-dimensional space; The magnitude and direction of the force in the three-dimensional space; finally, the geometric equation of the expected formation of the UAV formation in the three-dimensional space is established, and the Lagrangian multiplier is introduced in combination with the formation geometric equation to establish the UAV with formation constrai...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More