

Visual servo positioning and grabbing method
A visual servo and position information technology, applied in the field of robotics, can solve the problem of insufficient efficiency and accuracy of the positioning and grasping system, and achieve a cost-effective effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] Preferred embodiments of the present invention are described below with reference to the accompanying drawings. It should be understood by those skilled in the art that these embodiments are only used to explain the technical principle of the present invention, and are not intended to limit the protection scope of the present invention. Those skilled in the art can Adjust it as necessary to suit the specific application. For example, although the technical solution of the present invention is described by taking the full-sea depth autonomous remote-controlled submersible as an example in this specification, the products to which the technical solution of the present invention is applied are not limited to the full-sea-depth autonomous remote-controlled submersible. The technical solution can also be applied to other machines, and this change does not depart from the principle and scope of the present invention.
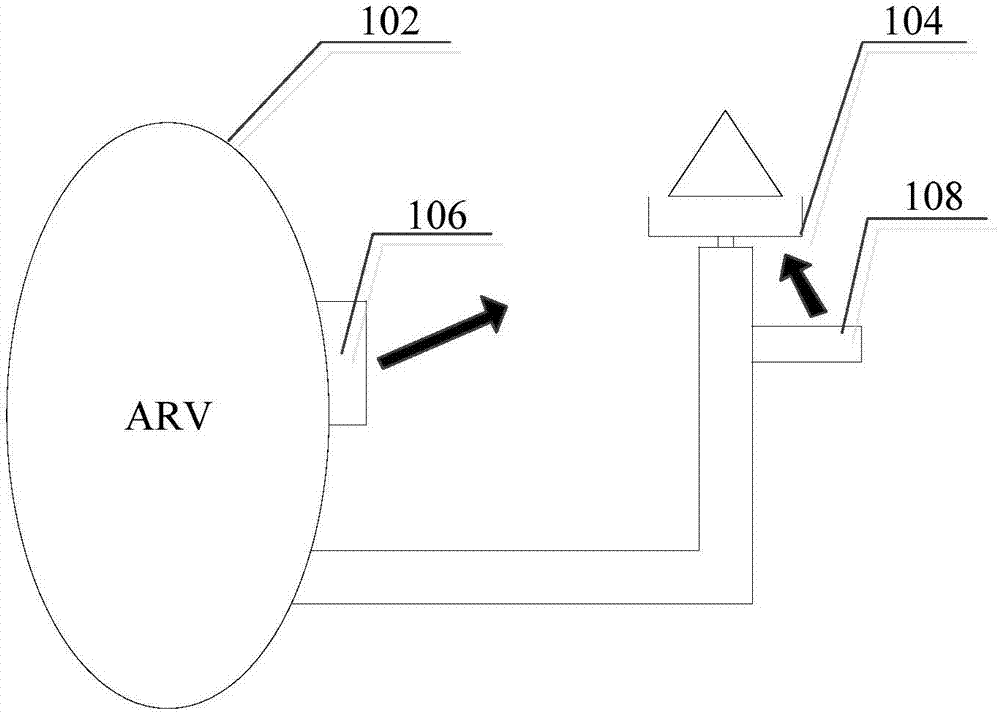
[0019] see first figure 1 , figure 1 It is a structural...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More